Курсовая работа: Програма обробки зображень
Підсумовування ведеться по околиці D крапки (i, j); akl значення ФРТ у цій околиці. Яскравості пікселів f у цій крапці й у її околиці збільшуються на коефіцієнти akl , перетворена яскравість (i,j) го пиксела є сума цих добутків. Елементи матриці задовольняють умові просторової інваріантості, тому a11 = a13 =a31 = a33 , a12 = a21 = a23 = a32 . Тільки три елементи матриці розміром 3х3 незалежні, у цьому випадку матриця інваріантна щодо поворотів, кратних 90˚. Досвід обробки зображень показує, що відсутність більш строгої осьової симетрії ФРТ слабко позначається на результатах. Іноді використовують 8вугільні матриці, інваріантні щодо поворотів на 45˚.
Фільтрація згідно (3) здійснюється переміщенням ліворуч праворуч (або зверху вниз) маски на один пиксел. При кожнім положенні апертури виробляються згадані вище операції, а саме перемножування вагових множників akl з відповідними значеннями яскравості вихідного зображення і підсумовуванням добутків. Отримане значення привласнюється центральному (i,j) му пікселу. Звичайно це значення поділяється на заздалегідь задане число K (нормуючий множник). Маска містить непарне число рядків і стовпців N, щоб центральний елемент визначався однозначно.
Розглянемо деякі фільтри, що згладжують шум. Нехай маска розміром 3х3 має вигляд:
Тоді яскравість (i,j) -го піксела після фільтрації визначиться як
![]()
Хоча коефіцієнти akl можна вибрати зі середньоквадратичного або іншої умови близькості не перекрученого шумом si,j і перетвореного gi,j зображень, звичайно їхній задають евристично. Приведемо ще деякі матриці фільтрів, що придушують шум:

У фільтрів H1 H4 множники, що нормують, K підібрані таким чином, щоб не відбувалося зміни середньої яскравості обробленого зображення. Поряд з масками 3х3 використовуються маски більшої розмірності, наприклад, 5х5, 7х7 і т.п. На відміну від фільтра H2 , у фільтрів H1 , H3 , H4 агарні коефіцієнти на перетинанні головних діагоналей матриці більше, ніж коефіцієнти, що коштують на периферії. Фільтри H1 , H3 , H4 дають більш плавна зміна яскравості по зображенню, чим H2 .
Нехай відліки корисного зображення fk,m мало міняються в межах маски. На зображення накладається аддітівный шум: fk,m + nk,m , відліки шуму nk,m випадкові і незалежні (або слабко залежні) зі статистичної точки зору. У цьому випадку механізм придушення шуму з використанням приведених фільтрів полягає в тому, при підсумовуванні шуми компенсують один одного. Ця компенсація буде відбуватися тим краще, чим більше число членів у сумі, тобто чим більше розмір (апертура) маски. Нехай, наприклад, використовується маска NN, у межах її корисне зображення має постійну яскравість f, шум з незалежними значеннями відліків nk,m , середнім значенням м = 0 і дисперсією у2 у межах маски (такий шум називають білим). Відношення квадрата яскравості (i,j)-го піксела до дисперсії шуму, тобто відношення сигнал/шум, дорівнює f 2 /у2.
Розглянемо, наприклад, маску типу H2 :

Середній квадрат яскравості дорівнює f 2 , середній квадрат інтенсивності шуму

Подвійна сума відповідає k= p, m = q, ця сума дорівнює у2/ N 2 .Чотириразова сума дорівнює нулеві, тому що відліки шуму при k ≠ p, m ≠ q незалежні: <n k,m n p,q > = 0. У результаті фільтрації відношення сигнал/шум стає рівним N 2 f 2 /у2 , тобто зростає пропорційно площі маски. Відношення яскравості (i,j)-го піксела корисного зображення до середньоквадратичного відхилення шуму зростає пропорційно N. Застосування маски 3х3, у середньому, підвищує відношення сигналу до шуму в 9 разів.
При імпульсній перешкоді механізм придушення полягає в тому, що імпульс "розпливається" і стає мало помітним на загальному тлі.
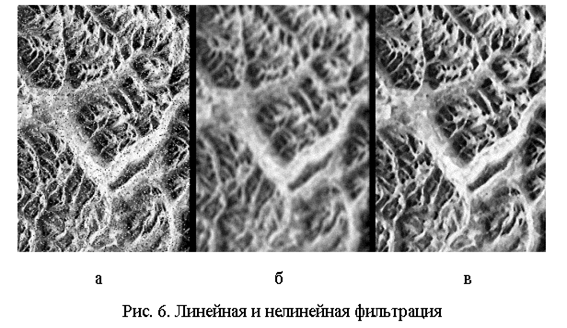
Однак часто в межах апертури значення корисного зображення все-таки змінюються помітним образом. Це буває, зокрема, коли до маски попадають контури. З фізичної точки зору, усі H1 H4 є фільтрами нижніх частот (зсереднюючими фільтрами), що придушують високочастотні гармоніки і шуму, і корисного зображення. Це приводить не тільки до ослаблення шуму, але і до розмивання контурів на зображенні. На мал. 6а показане вихідне зашумлене зображення, результат застосування фільтра типу Н2 приведений на мал. 6б (маска 5х5).
Розглянута вище фільтрація характеризувалася тим, що вихідні значення фільтра g визначалися тільки через вхідні значення фільтра f . Такі фільтри називаються не рекурсивними. Фільтри, у яких вихідні значення g визначаються не тільки через вхідні значення f , але і через відповідні вихідні значення, називаються рекурсивними.
При рекурсивній фільтрації можна зберігати ті ж значення вагових множників, що і приведені вище, існують рекурсивні фільтри зі спеціально підібраними множниками. Елементи вхідного зображення в межах вікна зміняться і приймуть вид:
Вагарні і що нормує множники рекурсивного фільтра залежать від місця розташування маски; рекурсивний локальний фільтр дозволяє враховувати усі вхідні значення фільтруємого зображення, тобто наближається по своїй дії до глобального фільтра.
Для усунення ефекту розмивання контурів при придушенні шуму варто переходити до нелінійної обробки. Прикладом нелінійного фільтра для придушення шуму служить медіанний фільтр. При медіанній фільтрації (i,j)-му пікселу привласнюється медіанне значення яскравості, тобто таке значення, частота якого дорівнює 0,5. Нехай, наприклад, використовується маска 33, у межі якої поряд з більш-менш рівномірним тлом потрапив шумовий викид, цей викид довелося на центральний елемент маски:
Будується варіаційний ряд. Варіаційним рядом V1 ,..., Vn вибірки f1 ,..., fn називають упорядковану по не убуванню послідовність елементів вибірки, тобто V1 = min(f1 ,..., fn ), Vn = max (f1 ,..., fn ) і т.д. У нашому випадку варіаційний ряд має вигляд: 63, 66, 68, 71, 74, 79, 83, 89, 212. Тут медіанне значення п'яте по рахунку (підкреслене), тому що всього чисел у ряді 9. При медіанній фільтрації значення 212, перекручене шумовим викидом, заміняється на 74, викид на зображенні цілком подавлений. Результат застосування медіанного фільтра показаний на мал. 6в.
Функція розсіювання крапки для медіанного фільтра є нуль. При розмірах вікна (2k+1)·(2k+1) відбувається повне придушення перешкод, що складаються не більш, ніж з 2(k2 + k) пікселів, а також тих, котрі перетинаються не більш, з k рядками або k стовпцями, При цьому не змінюється яскравість у крапках тла. Зрозуміло, при медіанній фільтрації може відбуватися перекручування об'єкта на зображенні, але тільки на границі або поблизу неї, якщо розміри об'єкта більше розмірів маски. Фільтр має високу ефективність при придушенні імпульсних перешкод, однак ця якість досягається підбором розмірів маски, коли відомі мінімальні розміри об'єктів і максимальні розміри перекручених перешкодою локальних областей.
Виділення контурів
Лінійні фільтри можуть бути призначені не для придушення шуму, а для підкреслення перепадів яскравості і контурів. Виділення вертикальних перепадів здійснюється диференціюванням по рядках, горизонтальних по стовпцях. Диференціювання виробляється в цифровій формі:

Тут ∆x=1 ? збільшення уздовж рядка, рівне 1 пікселу,