Курсовая работа: Радиотелеметрические системы с временным разделением каналов
где ![]() - полоса на уровне 0.707,
- полоса на уровне 0.707, ![]() .
.
В случае переходные искажения 1-го рода в системе ШИМ ошибка равна:
 . ( 21)
. ( 21)
Т.е. для уменьшения ошибки ![]() необходимо увеличивать полосу тракта
необходимо увеличивать полосу тракта ![]() или интервал
или интервал ![]() , возможно использовать предискажения.
, возможно использовать предискажения.
Глава 3 Помехоустойчивость РТМС с ВРК
Флюктуационные помехи на входе приемного устройства приводят к изменению амплитуды и длительности импульсов. Помехи, действующие между импульсами называются – интервальными. Помехи, накладывающиеся на импульсы делятся на срединные и краевые. При АИМ путем стробирования приемника можно избавиться только от интервальных помех. При ВИМ и ШИМ использование ограничений по минимуму и максимуму позволяет избавиться от срединных помех, но действие краевых помех остается. Оценим помехоустойчивость РТМС с АИМ-АМ, ШИМ-ЧМ, ФИМ-АМ.
Структурная схема приемной части системы с ВРК изображена на рисунке 24.
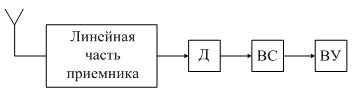
Рисунок 24
Полагаем, что отношение сигнал - шум достаточно велико. Шум нормальный белый в полосе приемника. В качестве критерия оценки используется отношение случайной компоненты выходного сигнала к полезной, т.е. относительную случайную ошибку. В этом случае при АИМ-АМ относительная случайная ошибка имеет вид [2]:
![]() , ( 22)
, ( 22)
где ![]() - среднее квадратичное значение шума,
- среднее квадратичное значение шума, ![]() - максимальное изменение амплитуды импульса, h – отношение сигнал - шум.
- максимальное изменение амплитуды импульса, h – отношение сигнал - шум.
Следовательно для уменьшения относительной случайной ошибки в этом случае необходимо увеличивать отношение сигнал - шум.
При ШИМ-ЧМ относительная случайная ошибка равна:
 , ( 23)
, ( 23)
где ![]() - среднее квадратичное значение флюктуаций фронта импульсов,
- среднее квадратичное значение флюктуаций фронта импульсов, ![]() - максимальная полезная ширина импульса,
- максимальная полезная ширина импульса, ![]() - девиация частоты несущей,
- девиация частоты несущей, ![]() - канальный интервал.
- канальный интервал.
Для уменьшения относительной случайной ошибки системы ШИМ-ЧМ надо увеличить отношение сигнал - шум, девиацию частоты несущей и канальный интервал.
При ФИМ-АМ относительная случайная ошибка имеет вид:
 , ( 24)
, ( 24)
![]() - максимальное временное смещение,
- максимальное временное смещение, ![]() – индекс временной модуляции,
– индекс временной модуляции, ![]() - длительность импульсов. Для уменьшения относительной случайной ошибки в этом случае необходимо увеличивать индекс временной модуляции и отношение сигнал – шум.
- длительность импульсов. Для уменьшения относительной случайной ошибки в этом случае необходимо увеличивать индекс временной модуляции и отношение сигнал – шум.
Глава 4 Многоступенчатая коммутация в РТМС с ВРК
Количество измеряемых величин и точность их измерения меняется в широких пределах, что требует применения разных частот дискретизации. В случае использования одного задающего генератора для увеличения гибкости аппаратуры используют многоступенчатую коммутацию, обеспечивающую разные тактовые частоты.
Принцип многоступенчатой коммутации показан на (рисунке 25).
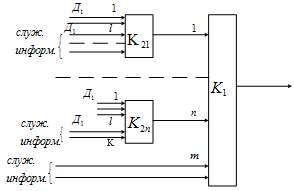
Рисунок 25
Первая ступень коммутаторов ![]() имеет m входов с временем подключения одного входа
имеет m входов с временем подключения одного входа ![]() . Вторая ступень включает n коммутаторов
. Вторая ступень включает n коммутаторов ![]() с временем подключения
с временем подключения ![]() . Входы с (n+1) до m используются для передачи служебной информации и осуществления синхронизации, аналоговые входы с (l+1) до К коммутаторов
. Входы с (n+1) до m используются для передачи служебной информации и осуществления синхронизации, аналоговые входы с (l+1) до К коммутаторов ![]() . Для простоты будем считать, что m=n, l=k, тогда
. Для простоты будем считать, что m=n, l=k, тогда ![]() , где N – общее число датчиков в схеме.
, где N – общее число датчиков в схеме.
Возможны два варианта использования схемы (рисунок 25):
1) Все коммутаторы ![]() работают синхронно и синфазно. А
работают синхронно и синфазно. А ![]() , т.е. за время подключения одного входа коммутатора
, т.е. за время подключения одного входа коммутатора ![]() , коммутатор
, коммутатор ![]() успевает опросить все m входов. Следовательно, на выходы схемы будут последовательно поданы сигналы всех первых датчиков, затем вторых и т.д. Увеличение частоты опроса для ряда датчиков достигается путем их подключения одновременно к нескольким входам одного коммутатора
успевает опросить все m входов. Следовательно, на выходы схемы будут последовательно поданы сигналы всех первых датчиков, затем вторых и т.д. Увеличение частоты опроса для ряда датчиков достигается путем их подключения одновременно к нескольким входам одного коммутатора ![]() (рисунок 26).
(рисунок 26).
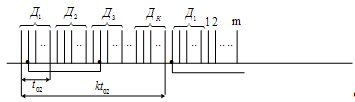
Рисунок 26
2) Все коммутаторы ![]() работают синхронно и синфазно, а
работают синхронно и синфазно, а ![]() . Т.е. на выходы схемы последовательно подаются сигналы всех датчиков коммутаторов
. Т.е. на выходы схемы последовательно подаются сигналы всех датчиков коммутаторов ![]() , затем
, затем ![]() и т.д. Увеличение частоты опроса ряда датчиков достигается подключением датчика одновременно к нескольким одноименным клеммам разных коммутаторов второй ступени (рисунок 27).
и т.д. Увеличение частоты опроса ряда датчиков достигается подключением датчика одновременно к нескольким одноименным клеммам разных коммутаторов второй ступени (рисунок 27).