Курсовая работа: Разработка робототехнического комплекса токарной обработки вставки, пальца и оси сателлита
Расчет захватного устройства произведем в четыре этапа, используя данные [1], [7].
Произведем расчет и реакций в губках.
Определим точку центра тяжести для каждой заготовки по формуле:
 , (7.1)
, (7.1)
где сi – точка центра тяжести простой фигуры,
mi – масса простой фигуры,
n – количество простых фигур, на которые разбита заготовка.
Данные занесем в таблицу 7.1.
Определим точки приложения сил и реакции в губках для каждой детали (Рис.7.1): точки приложения сил и реакции в губках
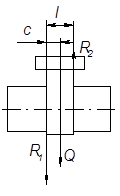
Рис.7.1
Рассчитаем нагрузки и реакции в губках по формулам:
 , (7.2)
, (7.2)
где l= – ширина губок,
с – расстояние от центра тяжести заготовки до ближайшей реакции,
Q – вес заготовки (mg).
Данные занесем в таблицу 7.1.
Рассчитаем силы воздействия губок на деталь.
Составим схему сил, действующих на деталь (Рис.7.2)
Схема действующих на деталь сил
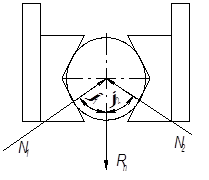
Рис.7.2
Рассчитаем силы воздействия губок на деталь по формуле:
![]() , (7.3)
, (7.3)
где φi – угол между проекцией на плоскость и силой Ni ,
kтр =0,14 – коэффициент трения между губками и заготовкой.
Данные занесем в таблицу 7.1.
Рассчитаем усилия привода.
Определим моменты и силы привода захватного устройства (Рис.7.3).