Курсовая работа: Разработка робототехнического комплекса токарной обработки
![]()
Определение сил воздействия губок на деталь.
Составляем схемы сил рис. 4.1, действующих на деталь, и определяем силы зажима:
![]()
где ![]() - реакция на губках захватного устройства,
- реакция на губках захватного устройства,
![]() - коэффициент трения.
- коэффициент трения.
Подставляем значения, получаем:
На первой паре губок:
![]()
На второй паре губок:
![]()
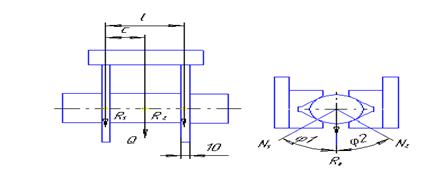
рис. 4.1 Действие сил
Определение конструктивных параметров привода и захватного устройства в целом
Рассчитаем усилие, которое должен развивать силовой привод для надежного закрепления детали, согласно схемы изображенной на рис. 4.2
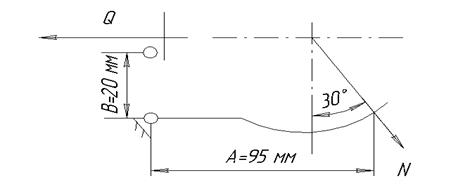
рис. 4.2 Кинематическая схема зажимного устройства
Вычислим требуемое усилие по формуле:
![]()
где n – число пар губок в захватном устройстве n=2;
N – наибольшая нормальная сила необходимая для удержания заготовки N=![]()
А и В – плечи захватного механизма А=95 мм, В=20 мм.
![]()
В качестве привода принимаем пневмоцилиндр одностороннего действия с рабочим давлением р=0,4 МПа.
Диаметр поршня цилиндра:

где ![]() - давление сжатого воздуха, МПа.
- давление сжатого воздуха, МПа.
Тогда: ![]()
Принимаем стандартное значение (с запасом): D=35 мм.