Курсовая работа: Разработка устройства логического управления
1. Введение
Современное промышленное производство является сложным комплексным процессом, который требует быстрого и многомерного контроля за всеми параметрами. Такой контроль был бы невозможен без применения современной электронной техники и автоматики вследствие того, что существуют многочисленные физические явления недоступные для простого визуального контроля. В настоящее время промышленная автоматика развивается значительными темпами, что связано с постоянно повышающимся уровнем сложности и качества технологических процессов. Электронные промышленные устройства являются сложными системами, в состав которых входят энергетические преобразователи, элементы электропривода, микропроцессорные узлы обработки информации и связи с внешними управляющими объектами, а также датчики различного назначения, устройства согласования с объектом управления. Очевидно, что задача разработки промышленного автомата включает в себя комплекс проблем, которые сами по себе представляют отдельную область современной электроники. Важно обеспечить высокую надежность и защиту от сбоев, поскольку существуют технологические процессы, нарушение которых может привести к катастрофическим последствиям опасным для жизни людей и окружающей среды. Поэтому создание таких устройств требует от разработчика хороших знаний в области электроники и в области технологических процессов, для управления которыми создается промышленный автомат.
Целью данного курсового проекта является разработка электронного автомата при заданных входных сигналах и контролируемых параметрах, а также исполнительных устройствах. Курсовой проект предусматривает решение основных задач реального инженерного проектирования электронной техники: структурный синтез, разработку принципиальной схемы, моделирование основных функциональных узлов, конструирование. Функционирование автомата производится по приведенному в задании алгоритму.
2. Структурный синтез управляющего автомата
2.1 Построение направленного графа абстрактного автомата
При проектировании устройства логического управления будем ориентироваться на синхронный дискретный автомат Мура, поскольку для асинхронного дискретного автомата опасен эффект состязания ("гонок"). Для исключения эффекта "гонок" нужно применять соседнее кодирование логических переменных всех состояний автомата, чтобы переход в следующее состояние отличался от предыдущего только одним разрядом. В данном случае это проблематично, т.к каждое состояние автомата по заданию содержит три разряда и существует возможность перехода из заданного состояния в одно из двух состояний в зависимости от выполнения или невыполнения определенного условия. Кроме того, для автомата Мура таблица выходов вырождается в одну строку, в отличие от автомата Мили. При построении автомата Мура операторные вершины граф-схемы ставятся в соответствие состояниям автомата. Переход в новое состояние осуществляется в зависимости от содержания условной вершины, следующей за операторной.
Построение направленного графа автомата Мура:
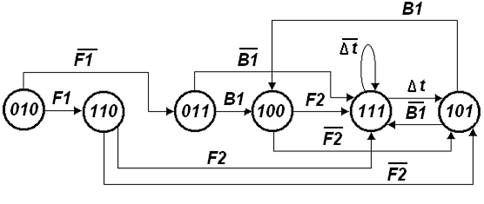
Рис.2.1 Направленный граф автомата Мура.
Направленный граф автомата построен, исходя из заданного алгоритма, и имеет шесть состояний, соответствующих операторным вершинам исходного алгоритма.
Здесь использованы следующие логические условия и сигналы: B1= S1 S2 S3;
При построении графа использованы следующие логические условия и сигналы:
![]()
![]()
Сигналы:
S - сигнал контактного датчика (S=0 - контакт разомкнут, S=1 - контакт замкнут); ![]() временная задержка,
временная задержка, ![]() .
.
2.2 Минимизация абстрактного автомата
В данном случае минимизация не требуется, так как исходный алгоритм не содержит повторяющихся состояний.
2.3 Кодирование внутренних состояний и выбор типа памяти
Поскольку автомат имеет шесть внутренних состояний, потребуется использовать трехразрядный код и соответственно три ячейки памяти. Это следует из формулы:
n= [целая часть (log2 N)] +1,где N - число внутренних состояний автомата; n - количество ячеек памяти.
В качестве элементов памяти применяются динамические D - триггеры, таким образом, автомат будет синхронным. Отказ от разработки асинхронного автомата связан со сложностью кодирования состояний асинхронного автомата с учетом эффекта "гонок". В связи с этим надежность асинхронного автомата при воздействии внешних возмущений, которые присутствуют в промышленных условиях, будет невысокой. Например, наличие импульсных помех в сигнальных цепях внешних датчиков и каналов связи может привести к ложным переключениям логических элементов, если не использовать дополнительных мер по защите от помех. При этом синхронный автомат более устойчив к импульсным помехам, так как входной сигнал D- триггера должен быть зафиксирован заранее, до прихода тактового перепада, на время не меньшее чем защитный интервал.
2.4 Определение логических функций возбуждения памяти
Определим функции возбуждения памяти. При составлении функций возбуждения памяти учитываются только те переходы, включая петли, при которых в соответствующем разряде логический "0" меняется на "1" или "1" сохраняется.
__ __ __ ___ __ ___ __ __ __
D2=g2g1g0∆t+g2g1g0∆t+g2g1g0B1+g2g1g0B1+g2g1g0B1+g2g1g0B1+g2g1g0F1
__ __ ___ __ ___ __ __ __
+g2g1g0F2 +g2g1g0F2 +g2g1g0F2 +g2g1g0F2;
___ __ __ ___ __ __ __ __ __ __ ___ __ ___
D1=g2g1g0∆t +g2g1g0F1+g2g1g0F1+g2g1g0F2+ g2g1g0F2 +g2g1g0B1+g2g1g0B1
___ __ ___ __ ___ __ __ ___ __ __ ___ __ ___