Курсовая работа: Синтез адаптивной системы управления процессом токарной обработки

![]()
![]()
![]()
![]()
Рис. 1 Модель процесса резания
3 Определение структуры основного контура системы
 |
????? ?????????????? ?????????????? ? ???????? ??????? ????????? ?? ???. 1:
Рис. 2 Функциональная схема системы автоматического регулирования (САР) выходной координаты
САР регулирует выходную координату процесса резания с заданной точностью. Процесс резания на схеме обозначен функциональным блоком ПР, управляющая координата ПР обозначена – ![]() , возмущающее воздействие –
, возмущающее воздействие – ![]() . ПУ – передаточное устройство, это механическая система, преобразующая механическую энергию вала двигателя в механическую энергию управляющего воздействия процесса резания. ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени
. ПУ – передаточное устройство, это механическая система, преобразующая механическую энергию вала двигателя в механическую энергию управляющего воздействия процесса резания. ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени ![]() . Двигатель Д преобразует электрическую энергию в механическую энергию вращения вала. Двигатель является машиной постоянного тока с независимым возбуждением. Возбуждение машины осуществляется обмоткой ОВД. Поток возбуждения в процессе регулирования не изменяется и остается равным его номинальному значению. Регулирование скорости двигателя осуществляется изменением напряжения якоря U.
. Двигатель Д преобразует электрическую энергию в механическую энергию вращения вала. Двигатель является машиной постоянного тока с независимым возбуждением. Возбуждение машины осуществляется обмоткой ОВД. Поток возбуждения в процессе регулирования не изменяется и остается равным его номинальному значению. Регулирование скорости двигателя осуществляется изменением напряжения якоря U.
ПЭ – преобразователь электрической энергии, преобразует электрическую энергию промышленной сети трехфазного переменного тока в электрическую энергию постоянного тока и регулирует величину выходного напряжения U, питающего цепь якоря двигателя Д. Преобразователь электрической энергии является линейным звеном. Выходное напряжение U равно номинальному значению при напряжении управления 10 В. С точки зрения динамики процесса ПЭ представляет собой апериодическое звено второго порядка с постоянными времени ![]() и
и ![]() .
.
УС – усилитель, является безынерционным звеном, усиливает напряжение, поступающее от корректирующего устройства
КУ – корректирующее устройство, корректирует динамические свойства САР. Статический коэффициент передачи КУ равен 1.
БЗ – блок задания. Блоком задания задается напряжение ![]() , его величина определяет величину задания выходной координаты САР. БЗ содержит в себе источник стабилизированного напряжения
, его величина определяет величину задания выходной координаты САР. БЗ содержит в себе источник стабилизированного напряжения ![]() и резистор R3.
и резистор R3. ![]() В.
В.
ДУ – измерительная система выходной координаты процесса резания. С точки зрения динамики представляет собой апериодическое звено первого порядка с постоянной времени ![]() . При номинальном значении выходной координаты выдаёт напряжение
. При номинальном значении выходной координаты выдаёт напряжение ![]() В.
В.
С – сумматор на базе операционного усилителя и на резисторах R1, R2, R3. Является безынерционным звеном с коэффициентом передачи равным 1. Суммирование осуществляется по алгоритму ![]() .
.
Функциональная схема САР представлена на рис.3:
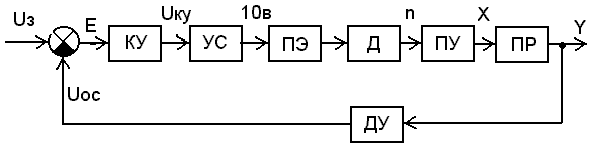
Рис. 3 Функциональная схема САР
По алгоритму функционирования данная САР является следящей. В ней выходная величина – температура в области резания – регулируется с заданной точностью при изменении напряжения на входе, т.е. система управляет выходной координатой. На вход системы подается напряжение ![]() , соответствующее заданной температуре в области резания. Это напряжение сравнивается с напряжением
, соответствующее заданной температуре в области резания. Это напряжение сравнивается с напряжением ![]() , поступающим с датчика обратной связи – например, естественной термопары. Если существует ненулевая разница этих напряжений – ошибка регулирования
, поступающим с датчика обратной связи – например, естественной термопары. Если существует ненулевая разница этих напряжений – ошибка регулирования ![]() , то она с соответствующим знаком поступает на КУ, УС, ПЭ. ПЭ таким образом меняет напряжение на своем выходе, чтобы свести ошибку регулирования путем изменения скорости вращения двигателя к минимуму или нулю. Если на систему действуют возмущения, то система с обратной связью будет компенсировать эти возмущения, поддерживая температуру в области резания постоянной.
, то она с соответствующим знаком поступает на КУ, УС, ПЭ. ПЭ таким образом меняет напряжение на своем выходе, чтобы свести ошибку регулирования путем изменения скорости вращения двигателя к минимуму или нулю. Если на систему действуют возмущения, то система с обратной связью будет компенсировать эти возмущения, поддерживая температуру в области резания постоянной.
4 Разработка структурной схемы САР
Найдем передаточные функции для элементов схемы.
Преобразователь энергии (ПЭ). С точки зрения динамики процесса ПЭ представляет собой апериодическое звено второго порядка с постоянными времени ![]() и
и ![]() . Его передаточная функция имеет вид:
. Его передаточная функция имеет вид:
![]() ,
,
где ![]()
![]()
![]()
Передаточное устройство (ПУ). ПУ является линейным звеном. С точки зрения динамики является апериодическим звеном первого порядка с постоянной времени ![]() , тогда:
, тогда:
![]() ,
,
где ![]() и
и ![]()
![]()
![]()
Датчик обратной связи (ДУ). Является апериодическим звеном первого порядка с постоянной времени ![]() , тогда:
, тогда:
![]() ,
,
где ![]() и
и ![]()
![]()
![]()
Двигатель (Д).
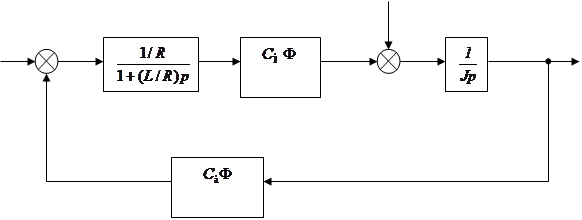
![]()
![]()
![]()
![]()
![]()
Ь ![]()
![]()