Курсовая работа: Синтез мікропрограмних автоматів
Оптимальну функціональну схему керуючих частин автомата синтезувати на елементах І, НЕ, RS-, D - тригерах.
3.2.1 Змістовна схема алгоритму
До складу змістовної схеми алгоритму (Рис.1 ) входять операційні та умовні верхівки. Наш алгоритм виконує знаходження максимального парного елементу кожному рядку масива, використовуючи при цьому чотири (4) умовні верхівки і вісім (8) операційних верхівок. Позначення операційних верхівок показано на Рис.2 . Позначення умовних верхівок на Рис.3 .
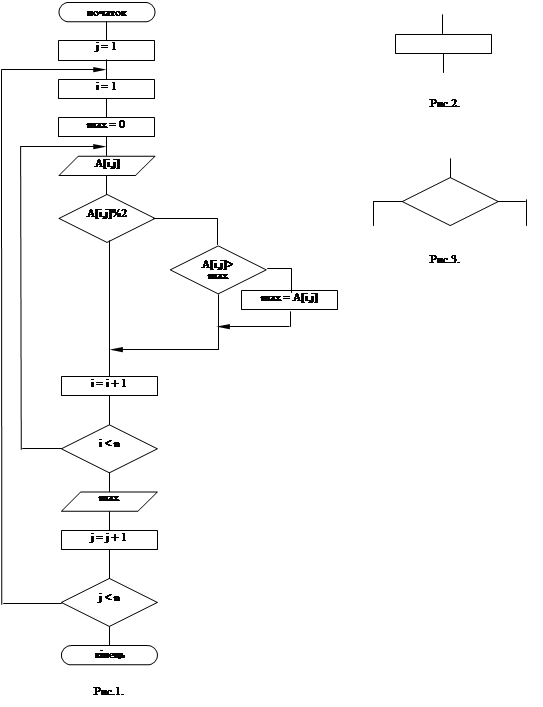 |
3.2.2 Змістовна таблиця кодування операційних та умовних верхівок
Кожна верхівка, чи то операційна чи умовна, кодується. При чому, якщо, мікрооперації повторюються і умовні верхівки повторюються, вони кодуються однаково. В даному прикладі три мікрооперації повторюються двічі, тому, однакові верхівки ми можемо кодувати одним кодом. Таблиця кодування верхівок зображена у Таблиці1 .
Таблиця 1
| Код | Зміст | Примітки |
| mY1 | j = 1 | |
| mY2 | i = 1 | |
| mY3 | max = 0 | |
| mY4 | A [i,j] | Ввід A [i,j] |
| mY5 | max = A [i,j] | |
| mY6 | i = i + 1 | |
| mY7 | max | Вивід max |
| mY8 | j = j + 1 | |
| X1 | A [i,j]% 2 | так - 1, ні - 0 |
| X2 | A [i,j] > max | так - 1, ні - 0 |
| X3 | i < n | так - 1, ні - 0 |
| X4 | j < m | так - 1, ні - 0 |
3.2.3 Закодована мікроопераційна схема алгоритма
Закодована мікроопераційна схема алгоритму будується на основі змістовної схеми алгоритму (Рис.1) і таблиці кодування операційних та умовних верхівок (Таблиця 1 ), шляхом заміни відповідних блоків. Схема алгоритму зображена на Рис.4.
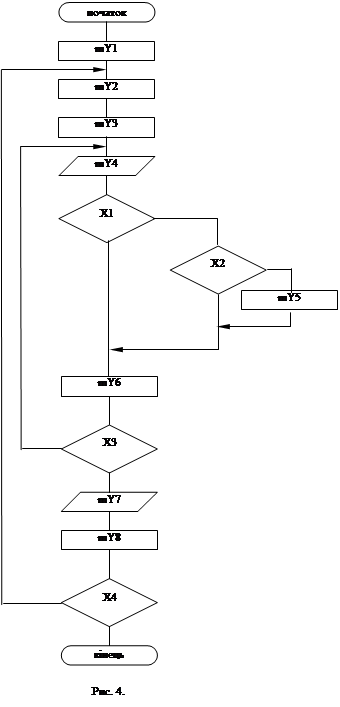 |
3.2.4 Таблиця кодування мікрокоманд
Складаємо таблицю кодування мікрокоманд. Кожна операція кодується своєю мікрокомандою. Мікрооперації, які виконуються одна за одною послідовно на протязі одного такта часу, об’єднуються в одну мікрокоманду. В даному прикладі двічі по дві мікрооперації ( (mY2 , mY3 ) и (mY7 , mY8 )) виконуються послідовно. Тому ми об’єднуємо їх в одну мікрокоманду. Таблиця кодування зображена в Таблиці 2 .
Таблиця 2
| Мікрокоманда | Мікрооперація |
| Y1 | mY1 |
| Y2 | mY2,mY3 |
| Y3 | mY4 |
| Y4 | mY5 |
| Y5 | mY6 |
| Y6 | mY7, mY8 |
3.2.5 Закодована мікрокомандна схема алгоритма
Складаємо закодовану мікрокомандну схему алгоритма (Рис.5 ). Проставляємо мітки внутрішніх станів автомата Мура таким чином:
мітки ставляться біля кожної мікрокоманди;
початок і кінець мікрокомандної схеми алгоритма відмічається міткою а0 ;
перехід з одного стану в інший повинен проходити через умовну або операційну верхівки автомата;
- біля кожної мікрокоманди мітки проставляються відповідно порядковому номеру;
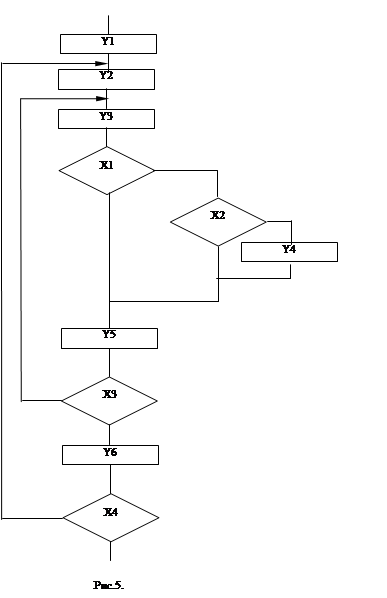 |
3.2.6 Основна таблиця автомата (СІ - синхроимпульс)
Будуємо основну таблицю автомата Мура (Таблиця 3 ). Ця таблиця складається на основі закодованої мікрокомандної схеми алгоритму
(Рис.5) У першому стовпчику таблиці записуються стани, в яких може збути наш автомат. В першому рядку таблиці записуються способи переходу автомата з одного стану в інший (вхідні сигнали), тобто, чи то буде СІ (той перехід, в процесі якого на шляху не зустрілася жодна вершина), чи при переході автомату буде поставлена умова. В клітинках таблиці фіксується, перехід в який стан виконується та, що буде на виході. Наприклад, із стану а0 автомат може здійснити перехід у стан а1 і в результаті цього переходу на виході автомата буде Y1 , тобто, автомат виконає ті мікрооперації, які виконуються на протязі одного такту часу (mY1 закодована мікрокомандою Y1 ), при чому, цей перехід станеться під синхроімпульс ним сигналом.
Таблиця 3
| Ѳ=1 | X1 , X2 | X1 , | X3 | X4 | |||
| a0 | a1 /Y1 | ||||||
| a1 | a2 /Y2 | ||||||
| a2 | a3 /Y3 | ||||||
| a3 | a5 /Y5 | a4 /Y4 | a5 /Y5 | ||||
| a4 | a5 /Y5 | ||||||
| a5 | a3 /Y3 | a6 /Y6 | |||||
| a6 | a2 /Y2 | a0 / __ |
3.2.7 Граф-схема переходів
Будуємо граф-схему переходів (Рис.7) . Граф-схема будується на основі Рис.5. і Таблиці 3 . Кружочками позначаються можливі стани автомата. Стрілки указують на перехід із стану i до стану j. Над стрілкою указується, під яким вхідним сигналом станеться перехід і, що при цьому буде на виході автомата.
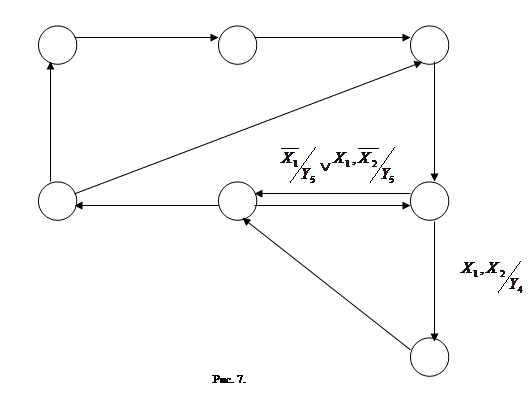 |
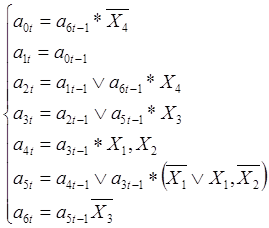
3.2.8 Система рівнянь переходів
Складаємо систему рівнянь переходів. Ця система складається на основі граф-схеми переходів (Рис.7 ) або основної таблиці абстрактного автомата (Таблиця 3 ).
3.2.9 Кодування внутрішніх станів автомата
Для того, щоб закодувати внутрішні стани автомата, визначаємо кількість необхідних для цього тригерів (n). Кількість тригерів розраховується із співвідношення: log2 A ≤ n, де
n - кількість необхідних тригерів;
А - кількість міток аi (a0 - a6 )
А = 7log2 7 ≤³ nÞn = 3,Оскільки, нам необхідно 3 тригера, то внутрішні стани автомата будемо кодувати трьох розрядним війковим кодом. Процес кодування зображений в Таблиці 4.
Таблиця 4
| S1 | S2 | S3 | |
| a0 | 0 | 0 | 0 |
| a1 | 0 | 0 | 1 |
| a2 | 0 | 1 | 0 |
| a3 | 0 | 1 | 1 |
| a4 | 1 | 0 | 0 |
| a5 | 1 | 0 | 1 |
| a6 | 1 | 1 | 0 |
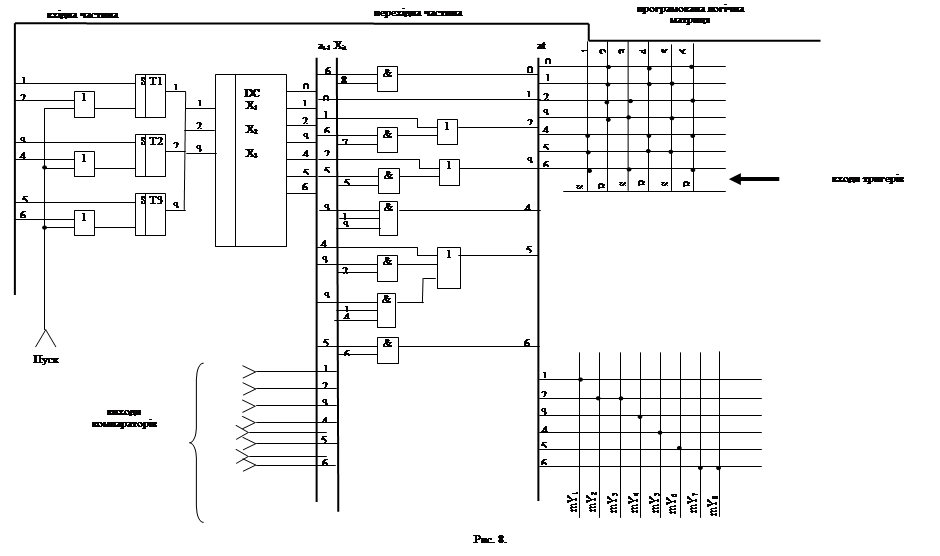
3.2.10 Побудова схеми операційного автомата
Операційний автомат складається з трьох (3) частин (Рис.5 ).
У вхідній частині розташовані три (3) D-тригери, три (3) логічних елементи АБО, на які подається вхідний сигнал, декодер та дві шини, одна з яких необхідна для передачі сигналів, які надходять з декодера, а інша - для сигналів з виходів компаратора.
У перехідній частині автомата виконується перетворення сигнала на протязі одного такту часу. Пройшовши через логічні елементи І та (або) АБО, чи того не роблячи, сигнал змінюється і результат надходить на шину (at ), відкіля продовжує передаватися до програмованої логічної матриці. Перехідна частина будується на основі системи рівнянь переходів.
Вихідна частина . Ця частина будується на основі системи рівнянь виходів. Тут виконується той самий процес, що й у перехідній частині, тільки сигнали подаються на вихідну шину Yt , з якої сигнал надходить до вихідної матриці.
3.2.11 С хема операційного автомата
 |
Висновки
В результаті виконання курсового проекту повністю виконане індивідуальне завдання. Синтезовано мікропрограмний автомат за схемою Уілкса-Стрінжера у вигляді автомата Мілі, та автомат за схемою Уілкса-Стрінжера у вигляді автомата Мура.
Сформульовано докладні алгоритми виводу автоматів, та отримано кінцеві структурні схеми на І, АБО, НЕ, RS, D - тригерах і граф схеми переходів автоматів.