Курсовая работа: Тахометр индукционный
Приложение Б. 37
Приложение В.. 38
Приложение Г. 39
Приложение Д.. 40
Приложение Е. 41
ВВЕДЕНИЕ
Измерительный преобразователь – это техническое устройство, построенное на определенном физическом принципе действия, выполняющее одно частное измерительное преобразование. Работа измерительных преобразователей протекает в сложных условиях, так как объект измерения – это, как правило, сложный, многогранный процесс, характеризующийся множеством параметров, каждый из которых действует на измерительный преобразователь совместно с остальными параметрами. Нас же интересует только один параметр, который называем измеряемой величиной, а все остальные параметры процесса считаем помехами.
Принцип действия индукционных преобразователей основан на использовании явления электромагнитной индукции. Индукционные преобразователи широко применяются для измерения параметров магнитных полей, частоты вращения, линейных и угловых скоростей, параметров вибрации и сейсмических колебаний, расхода жидких веществ.
Погрешность индукционных преобразователей в значительной степени зависит от режима, в котором они работают. Наибольшая погрешность возникает в режиме, при котором через нагрузку течет значительный ток.
Основные тенденции, характерные для современной техники – это повышение точности и расширение частотного диапазона измеряемых величин. Эти тенденции в полной мере относятся к индукционным измерительным преобразователям, область применения которых в последние годы значительно расширилась, а метрологические характеристики благодаря ряду новых интересных решений намного улучшились.
Индукционные преобразователи обладают высокой надежностью и высокими метрологическими и эксплуатационными характеристиками.
1 ОБЗОР ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ ВРАЩЕНИЯ
Обзор преобразователей частоты вращения представлен на листе 1 графической части курсового проекта.
1.1 Оптический тахометр
В наиболее простой форме оптический тахометр состоит из источника света и оптического приемника — фотодиода или фототранзистора.
Вращающееся тело либо снабжают отражающими метками расположенными регулярно по окружности, на которые направляется световой пучок, либо соединяют с диском, имеющим попеременно прозрачные и непрозрачные сектора, который располагают между источником и приемником света. Получая модулированный скачкообразными изменениями отражения или пропускания поток, фотоприемник выдает электрический сигнал с частотой, пропорциональной скорости вращения, и с амплитудой, не зависящей от этой скорости.
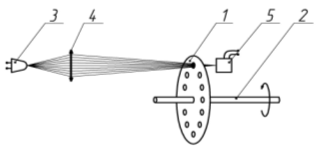
Рисунок 2 – Принципиальная схема конического тахометра
Диапазон измеряемых скоростей зависит, с одной стороны, от числа скачков оптических свойств (риски, щели, прозрачные сектора, нанесенные на диск или на вращающееся тело), а с другой — от полосы пропускания приемника и связанных с ним электрических схем. Для измерений малых скоростей используются диски с большим числом щелей (от 500 до нескольких тысяч); в измерениях больших скоростей, например 105 – 106 об/мин в случае ультрацентрифуг, диск имеет только одну щель, и максимальная измеряемая скорость определяется верхней граничной частотой электрической цепи.
Достоинства оптического тахометра: простота конструкции, линейная зависимость между входным и выходным сигналом, независимость выходного сигнала фотоприемника от скорости вращения, широкий диапазон измерений.
Недостатки: возможно загрязнение отражающих меток или секторов диска, малая надежность, громоздкость, сложность изготовления.
1.2 Центробежные тахометры
Центробежные тахометры выполняются в двух вариантах: конический (рисунок 2) и кольцевой (рисунок 3).
В коническом тахометре на шарнирах, вращающихся вместе с осью, установлены грузы m , которые под действием центробежных сил расходятся, перемещая вдоль оси муфту 1 и сжимая пружину 2.
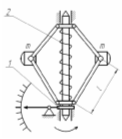
Рисунок 2 – Принципиальная схема конического тахометра
Если обозначить у - перемещение муфты и у0 - начальную длину пружины (при щ = 0), то зависимость у от угловой скорости щ будет иметь вид
![]() (1)
(1)
где ![]() – чувствительность прибора;
– чувствительность прибора;
n , т, r 0 и c 1 - соответственно число грузов, масса груза, радиус муфты и коэффициент жесткости пружины.
Из выражения (1) следует, что центробежный тахометр имеет квадратичную характеристику.
В кольцевом тахометре при не вращающейся оси (щ = 0) плоскость кольца наклонена по отношению к оси на угол а0 (рисунок 3). При вращении оси кольцо стремиться занять положение, перпендикулярное оси вращения, однако этому препятствует пружина 2. Перемещение муфты 1 пропорционально приращению угла отклонения кольца