Курсовая работа: Тахометр индукционный
Из выражения (6) видно, что погрешности тахометра возникают из-за непостоянства магнитной индукции в зазоре В, сопротивления рамки R р и внутреннего сопротивления якоря RB Уменьшение погрешности, вызванной изменением В, достигается применением термомагнитного шунта. Для уменьшение погрешности от непостоянства R р применяется добавочное сопротивление R Д и другие схемы компенсации.
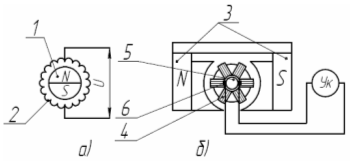
Рисунок 5 – Принципиальные схемы электрических тахометров постоянного тока
Диапазон измерений серийно выпускаемых тахогенераторов постоянного тока составляет от 0,1 до 6000 об·мин-1 .
К достоинствам электрических генераторов постоянного тока относятся: линейная зависимость между входным и выходным сигналом; малые габаритные размеры; небольшая масса; отсутствие фазовой погрешности; возможность возбуждения постоянными магнитами, что позволяет обойтись без источника питания.
Недостатки генераторов постоянного тока: сложность конструкции; наличие скользящего контакта между щетками и коллектором, что приводит к снижению надежности тахогенератора и к нестабильности выходной характеристики; наличие зоны нечувствительности; помехи радиоприему.
1.5 Индукционный тахометр
Тахогенератор такого прибора (рисунок 6) представляет собой электрическую машину асинхронного типа, состоящую из внешнего 1 и внутреннего 2 магнитопроводов, в зазоре между которыми располагаются статорная обмотка 3 (состоящая из обмотки возбуждения и сигнальной обмотки) и алюминиевый тонкостенный ротор 4, выполненный в виде цилиндра. Оси обмоток (катушек) возбуждения и сигнальной взаимно перпендикулярны.
К обмотке возбуждения подводится переменное U П напряжение частотой 1 кГц, а с сигнальной обмотки снимается напряжение Uc той же частоты, амплитуда которого пропорциональна угловой скорости вращения полого ротора ![]() . При неподвижном роторе и полной электрической и магнитной симметрии статора напряжение в сигнальной обмотке не индуктируется.
. При неподвижном роторе и полной электрической и магнитной симметрии статора напряжение в сигнальной обмотке не индуктируется.
При вращений ротора с угловой скоростью ![]() в сигнальной обмотке индуктируется напряжение
в сигнальной обмотке индуктируется напряжение
![]() (7)
(7)
где f – частота питающего напряжения (f=400 Гц);
В – магнитная индукция, создаваемая в зазоре питающим напряжением.
Таким образом, в рассматриваемом тахометре напряжение несущей частоты f модулируется измеряемой угловой скоростью ![]() . Для измерения угловой скорости необходимо осуществить демодуляцию сигнала Uc и подать демодулированное напряжение на измеритель.
. Для измерения угловой скорости необходимо осуществить демодуляцию сигнала Uc и подать демодулированное напряжение на измеритель.
Поскольку принцип действия индукционного тахометра основан на наведении питающим напряжением в роторе вихревых токов, которые в свою очередь наводят ЭДС в сигнальной обмотке, то погрешности прибора вызываются непостоянством амплитуды и частоты питающего напряжения, непостоянством сопротивления ротора для вихревых токов, непостоянством нагрузки.
Для уменьшения погрешностей от непостоянства U П и f можно применить схемы стабилизации этих величин. Стабилизация сопротивления ротора достигается путем выбора материала с малым температурным коэффициентом. Для устранения погрешности от непостоянства нагрузки должно быть удовлетворено условие работы тахогенератора в режиме холостого хода.
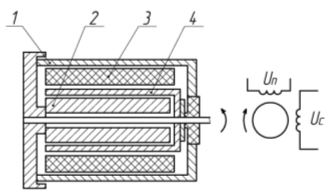
Рисунок 6 – Принципиальная схема индукционного тахометра
Недостатки индукционного тахометра: необходимость в источнике питания, сложность изготовления, значительные погрешности.
Достоинства индукционного тахометра: дистанционность передачи выходного сигнала; у тахометра такого типа почти отсутствует «мертвая зона», в которой невозможно проводить измерения, поэтому его можно применять для измерения малых скоростей.
1.6 Вывод
За основу дальнейшей разработки индукционного тахометра выбран датчик с переменным магнитным сопротивлением. По сравнению с другими рассмотренными преобразователями он является одним из простых с точки зрения конструкции. Преобразователь не содержит дорогостоящих деталей. Он удобен с точки зрения взаимозаменяемости и ремонта. Преобразователь данного типа можно выполнить в закрытом исполнении, что позволяет использовать его в неблагоприятных условиях. Еще одним преимуществом данного преобразователя является жесткое скрепление его вала с валом объекта, частоту вращения которого необходимо. Его конструкция позволяет использование как в лабораторных условиях, так и на производстве.
2 ТЕХНИЧЕСКОЕ ЗАДАНИЕ
2.1 Введение
Настоящее техническое задание распространяется на разработку индукционного тахометра, предназначенного для измерения частоты вращения вращающихся объектов.
2.2 Источники разработки
Преобразователь разрабатывается на основании датчика с переменным магнитным сопротивлением.
2.3. Технические требования
2.3.1 Состав изделия
Индукционный тахометр содержит: корпус, крышку корпуса, П-образный сердечник с двумя намотанными на него катушками, вставленный в пазы корпуса и закрепленный с помощью фиксирующей скобы, вал, на котором надета зубчатая шестерня. Вал крепится в двух радиально-упорных подшипниках, вставленных в крышку корпуса. Между подшипниками располагается распорная втулка. Для предотвращения передвижения вала внутри подшипников на нем установлено стопорное кольцо. Для предотвращения перемещения подшипников внутри крышки корпуса в ней также установлено стопорное кольцо. Окончательное закрепление подшипников внутри крышки корпуса производится с помощью навинчивания запорной крышки. Также на крышке корпуса располагаются выводы катушек. Скрепление двух корпуса и его крышки осуществляется с помощью винтов.
Измерение осуществляется следующим образом: вал преобразователя с помощью шпоночного соединения присоединяется к измеряемому объекту. На катушку подмагничивания подается постоянное напряжение. Между выводами вторичной катушки измеряется переменное напряжение, амплитуда которого пропорциональна скорости вращения вала и с откалиброванной в об·мин-1 шкалы вольтметра снимаются показания.
2.3.2 Технические параметры
Диапазон измерений преобразователя 100ч1000 об·мин-1 .
Чувствительность преобразователя 10 об·мин-1
Погрешность преобразователя не превышает 5%.
Стабильное постоянное напряжение на катушке подмагничивания составляет 1±0,05В.
Общая потребляемая мощность преобразователя не превышает 0,02 Вт.