Курсовая работа: Цифровые и адресные мгновенно-суммирующие расходомеры топлива
Сравнение различных адаптивных РТМС необходимо производить при заданных статистических моделях параметров и заданных условиях функционирования всей системы. Обычно экономический эффект от внедрения системы сжатия данных составляет около 10% от стоимости всей системы, например, для системы "Аполлон" стоимостью 20 млд. $ экономический эффект от внедрения системы сжатия данных составил 240 млн. $.
Глава 1. Общие сведения о цифровых РТМС
Современные РТМС являются преимущественно цифровыми. Преимуществом цифровых РТМС перед другими типами РТМС является малая (менее 0,1%) погрешность передачи информации. Цифровые методы обеспечивают освобождение от помех при регенерации сигнала. В типовых РТМС с цифровой передачей преимущественно применяются двухступенчатая модуляция КИМ – ЧМ, а в космических РТМС – КИМ – ФМ и КИМ – ОФМ. В системах, обеспечивающих высокую информативность, используется трехступенчатая модуляция КИМ – ЧМ – АМ, КИМ – ЧМ – ЧМ, КИМ – ФМ – АМ. В большинстве типовых систем применяется двоичный код с числом информационных символов в кодовой комбинации (слове) от 5 до Слова дополняются вспомогательными символами, обеспечивающими их разделение на приемной стороне, а также обнаружение и исправление ошибок. В качестве кадрового сигнала синхронизации, обеспечивающего определение начала и конца телеметрического сигнала (кадра) используются определенные кодовые комбинации, которые не применяются для передачи информации, и которые после корреляционной обработки на приемной стороне позволяют сформировать короткий импульс, обеспечивающий точную временную привязку сигнала. Цифровые РТМС позволяют обеспечить информационную скрытность. Основной задачей при разработке цифровых РТМС является выбор типа кодера и вида модуляции, обеспечивающих минимальную полосу пропускания системы.
Глава 2. Функциональная схема цифровой РТМС
2.1 Передающая часть
Структура цифровой РТМС зависит от различных факторов: скрытности, помехоустойчивости, числа каналов, способа кодирования сообщений, системы сжатия данных, системы модуляции, методов синхронизации. Рассмотрим обобщенную функциональную схему бортовой аппаратуры цифровой РТМС (рисунок 1) с двухступенчатой модуляцией, здесь: БССО – бортовые системы сбора и обработки информации;
УС – устройство сжатия;
ФС – формирователь синхросигналов;
УК – устройство калибровки;
С – синхронизатор.
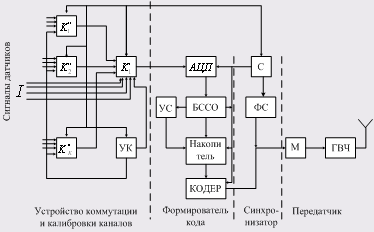
Рисунок 1
На схеме показана двухступенчатая коммутация каналов, причем через ![]() обозначен коммутатор первой ступени, а через
обозначен коммутатор первой ступени, а через ![]() - коммутаторы второй ступени. Группа обозначенная I каналов подключена непосредственно к
- коммутаторы второй ступени. Группа обозначенная I каналов подключена непосредственно к ![]() . Такое включение обеспечивает информационную гибкость. От устройства калибровки каналов (УК) на входы
. Такое включение обеспечивает информационную гибкость. От устройства калибровки каналов (УК) на входы ![]() подаются калибровочные сигналы, соответствующие 0 и 100% напряжения датчиков. Скорость переключения каналов
подаются калибровочные сигналы, соответствующие 0 и 100% напряжения датчиков. Скорость переключения каналов ![]() и
и ![]() разная и определяется частотой следования импульсов, поступающих от синхронизатора (С). Перед подачей на АЦП групповой АИМ-1 сигнал преобразуется в АИМ-2. это необходимо для того, чтобы на время кодирования значение сигнала не изменялось. АЦП должен обладать высоким быстродействием, чтобы время преобразования сигнала в цифровой код было равно или меньше длительности канального интервала. Далее сигнал в цифровой форме с выхода АЦП поступает на УС и БССО, а потом на накопитель (Н), который опрашивается с частотой переключения каналов. В накопителе с помощью сдвигающего регистра решается задача преобразования параллельного кода в последовательный. С выхода накопителя сигнал поступает на кодер, где осуществляется представление информации в избыточном коде, который используется в радиолинии. Для увеличения быстродействия используют несколько АЦП, работающих поочередно, но при этом увеличиваются габариты аппаратуры. Например, один АЦП обслуживает четные, а другой нечетные каналы. Иногда первый АЦП обслуживает одну группу каналов, а второй другую (рисунок 2). Управление работой всех блоков схемы 2 осуществляется синхронизатором. Сигналы с выхода кодера и формирователя сигналов синхронизации (ФСС) поступают на вход модулятора (М), управляющего работой генератора высокой частоты (ГВЧ).
разная и определяется частотой следования импульсов, поступающих от синхронизатора (С). Перед подачей на АЦП групповой АИМ-1 сигнал преобразуется в АИМ-2. это необходимо для того, чтобы на время кодирования значение сигнала не изменялось. АЦП должен обладать высоким быстродействием, чтобы время преобразования сигнала в цифровой код было равно или меньше длительности канального интервала. Далее сигнал в цифровой форме с выхода АЦП поступает на УС и БССО, а потом на накопитель (Н), который опрашивается с частотой переключения каналов. В накопителе с помощью сдвигающего регистра решается задача преобразования параллельного кода в последовательный. С выхода накопителя сигнал поступает на кодер, где осуществляется представление информации в избыточном коде, который используется в радиолинии. Для увеличения быстродействия используют несколько АЦП, работающих поочередно, но при этом увеличиваются габариты аппаратуры. Например, один АЦП обслуживает четные, а другой нечетные каналы. Иногда первый АЦП обслуживает одну группу каналов, а второй другую (рисунок 2). Управление работой всех блоков схемы 2 осуществляется синхронизатором. Сигналы с выхода кодера и формирователя сигналов синхронизации (ФСС) поступают на вход модулятора (М), управляющего работой генератора высокой частоты (ГВЧ).
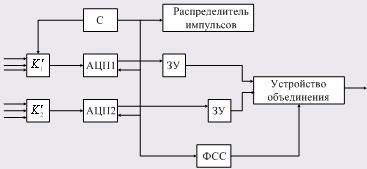
Рисунок 2
Возможно использование трех ступеней модуляции. Это позволяет увеличить число каналов (рисунок 3).
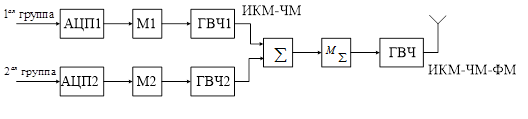
Рисунок 3
Сигналы первой и второй группы совпадают по времени. Частоты ![]() и
и ![]() ГВЧ1 и ГВЧ2 отличаются на величину ширины спектра КИМ сигнала.
ГВЧ1 и ГВЧ2 отличаются на величину ширины спектра КИМ сигнала.
Кроме того, типовая схема цифровой РТМС может включать: коммутаторы третьей ступени и устройства запоминания информации.
2.2 Приемная часть
Состав наземной РТМС зависит от вида модуляции сигналов, метода выделения и формирования импульсов синхронизации, способа регистрации и отображения данных телеизмерений. На рисунке 4 изображена обобщенная функциональная схема наземной аппаратуры с двухступенчатой модуляцией и посимвольным приемом сигналов.
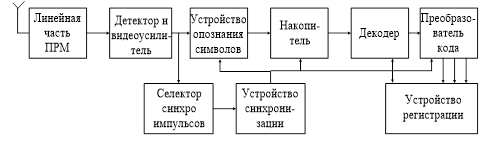
Рисунок 4
С выхода видеоусилителя сигнал поступает на устройство опознания символов и селектор синхроимпульсов, управляющий работой устройства синхронизации. Устройство синхронизации вырабатывает импульсы, необходимые для определения временных границ символов, слов и кадров. Устройство опознавания (или регенерации) символов определяет по выходному сигналу ПРМ, какие символы передавались. Для этого необходимы импульсы с частотой символов из УС. При передаче данных последовательным кодом символы принимаемых кодовых комбинаций запоминаются в накопителе, который управляется синхроимпульсами слов. Декодирующее устройство на основе анализа кодовой комбинации производит обнаружение и исправление ошибок. Если передача велась безызбыточным кодом, то декодирующее устройство отсутствует. Преобразователь кода осуществляет представление сигнала с выхода декодирующего устройства к виду удобному для регистрации данных.
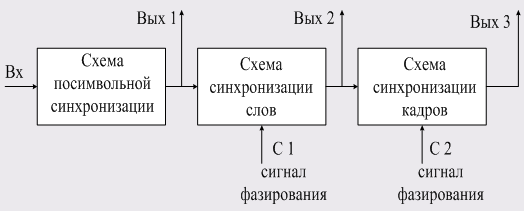
Устойчивая работа приемной станции во многом зависит от помехоустойчивости кадровой синхронизации, синхронизации слов и символов. В современных цифровых РТМС используются три раздельные схемы для синхронизации символов, слов и кадров.
Структурная схема устройства синхронизации приведена на рисунке 5.