Курсовая работа: Управление ошибками при передаче информации по каналам связи
В удаленном режиме символ ![]() сначала посылается в компьютер, а затем возвращается обратно (отражается как эхо), и только после этого выводится на экран терминала (рис. 2).
сначала посылается в компьютер, а затем возвращается обратно (отражается как эхо), и только после этого выводится на экран терминала (рис. 2).
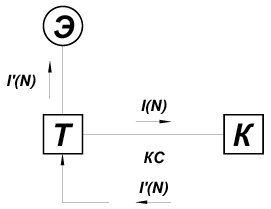
Рис. 2
Если возвращенный символ ![]() не совпадает с посланным, то пользователь посылает компьютеру управляющий символ
не совпадает с посланным, то пользователь посылает компьютеру управляющий символ ![]() (удаление), тем самым извещая компьютер о том, что предыдущий символ был получен им неверно и должен быть игнорирован (рис. 3).
(удаление), тем самым извещая компьютер о том, что предыдущий символ был получен им неверно и должен быть игнорирован (рис. 3).

Рис. 3
Как правило, метод эхо-контроля является саморегулирующимся, однако если буферная память удаленного компьютера переполняется, то он перестает отражать символы обратно на экран терминала. Компьютер будет читать символы, а затем их аннулировать. По этой причине используется дополнительный механизм автоматического управления потоком, гарантирующий прекращение посылки символов терминалом до тех пор, пока не будет ликвидировано состояние перегрузки компьютеров.
Этот механизм заключается в том, что компьютер возвращает терминалу специальный символ “![]() -сброшен”, который указывает на необходимость прекращения посылки символов, а после ликвидации состояния загрузки компьютер посылает терминалу парный к символу “
-сброшен”, который указывает на необходимость прекращения посылки символов, а после ликвидации состояния загрузки компьютер посылает терминалу парный к символу “![]() -сброшен” символ “
-сброшен” символ “![]() -установлен”. Таким образом, давая знать управляющему узлу терминала, что он может возобновить посылку символов (рис. 4).
-установлен”. Таким образом, давая знать управляющему узлу терминала, что он может возобновить посылку символов (рис. 4).

Рис. 4
Аналогичный механизм используется при взаимодействии компьютера с менее быстродействующими терминалами, например, принтерами. В этом случае поток символов регулирует управляющий узел терминала.
Эхо-контроль требует, по меньшей мере, двукратной пересылки каждого символа при непосредственном участии самого пользователя и, следовательно, относительно неэффективно использует пропускную способность канала связи. Однако вследствие своей простоты эхо-контроль широко применяется во многих системах обмена информацией.
Автоматический запрос на повторение используется в случае, когда пользователь не вовлечен непосредственно в процесс передачи данных, поскольку обмен информацией между двумя узлами оборудования системы осуществляется несколькими методами и автоматически. Общим для всех методов является то, что они требуют возврата лишь небольшого сообщения или кадра, извещающего о правильности или неправильности принятого кадра, а не повторной передаче его копии.
Это особенно важно при кадро-ориентированной передаче, когда пересылаемый кадр может содержать достаточно большое количество байтов или символов. Такое использование схемы извещения (![]() и
и ![]() -кадры) называется автоматическим запросом на повторение.
-кадры) называется автоматическим запросом на повторение.
В зависимости от объема буферной памяти и пропускной способности канала связи возможны 2 наиболее часто реализуемых режима работы схемы извещения: “бездействие – ЗПР” (послать-и-ждать) и “непрерывная передача – ЗПР”. Последний режим может применять либо стратегию выборочной повторной передачи, либо механизм “возврат-к-N”.
Механизм передачи “бездействие – ЗПР”
Режим “бездействие – ЗПР” наименее эффективно использует пропускную способность каналов связи. Рассмотрим 3 режима работы этого механизма:
1. При передаче без ошибок.
2. При искажении I-кадра.
3. При искажении ACK-кадра.

Рис. 5
![]() – время задержки при передаче данных (от первой станции ко второй);
– время задержки при передаче данных (от первой станции ко второй);
![]() – время передачи
– время передачи ![]() -кадра;
-кадра;
![]() – время обработки
– время обработки ![]() -кадра принимающей станцией;
-кадра принимающей станцией;
![]() – время передачи
– время передачи ![]() -кадра;
-кадра;
![]() – время обработки
– время обработки ![]() -кадра принимающей станцией.
-кадра принимающей станцией.
Во многих случаях передачи данных ![]() -кадры передаются одновременно в обоих направлениях, обозначим источник
-кадры передаются одновременно в обоих направлениях, обозначим источник ![]() -кадров как ПС, а их приемник – ВС. Для простоты будет рассматриваться только односторонний поток.
-кадров как ПС, а их приемник – ВС. Для простоты будет рассматриваться только односторонний поток.
В режиме “бездействие – ЗПР” используется следующий порядок обмена кадрами: