Лабораторная работа: Электродвигатели постоянного и переменного тока
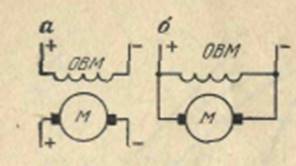
Схемы таких электродвигателей приведены на рис.
Уравнение скоростной характеристики двигателя постоянно тока с независимым и параллельным возбуждением имеет вид:
Вращающий момент двигателя определяется из выражения
М. = kФI(4)
а э. д. с. двигателя
Е = kФw. (5)
В трех последних формулах: w — угловая скорость, рад/с; U- подводимое напряжение, В; I — ток в цепи якоря, А; Rя — сопрoтивление обмотки якоря, Ом; Rр — сопротивления реостата в цеп якоря. Ом; Ф — магнитный поток возбуждения двигателя, Вб; k- коэффициент, зависящий от конструкции машины.
Подставив в уравнение (4) значение тока якоря из формул (5), получим уравнение механической характеристики электродвигателя (6)
Поскольку выражение (6) — это уравнение прямой, значит механические характеристики двигателей параллельного и независимого возбуждения прямолинейны (рис.). Характеристика R =Rя называется естественной, остальные — искусственными.
Скорость идеального холостого хода определяется из уравнения (6) при условии, что М = 0
Величину сопротивления якоря двигателя параллельного и независимого возбуждения ориентировочно можно определить из выражения:
Номинальное значение к.п.д. можно вычислить, как:
Где Рном – номинальная мощность электродвигателя, кВт.
Угловая скорость двигателя на естественной механической характеристике при номинальном моменте называется номинальной.
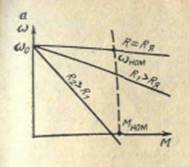
Согласно уравнениям (5) и (6) увеличение сопротивления реостата в цепи якоря приводит к увеличению угла наклона механической характеристики, т.е. к снижению скорости.
Лабораторная работа №2.
Тормозные режимы электродвигателя
Для двигателя последовательного возбуждения возможны лишь два режима электрического торможения: противовключением и динамическое. Режима рекуперативного торможения у двигателей этого типа нет, так как э.д.с. не может быть выше напряжения сети в связи с тем, что скорость идеального холостого хода не имеет конечной величины [см. формулу (5)].

Динамическое торможение может быть осуществлено двумя способами: с самовозбуждением (рис.а) и с независимым возбуждением (рис.в). При торможении с самовозбуждением необходимо сохранить направление тока возбуждения таким же, как при нормальной работе двигателя. Без этого машина размагнитится, и торможения не получится.
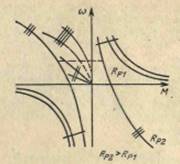
Механические характеристики режима динамического торможения (см. рис, четыре засечки) нелинейны вследствие непостоянного магнитного потока. В области, обозначенной пунктирными линиями, торможение практически отсутствует. Рассмотренный режим используют редко, в основном как аварийный при исчезновении напряжения сети.
Механические характеристики динамического торможения с независимым возбуждением аналогичны соответствующим характеристикам двигателя параллельного возбуждения (см. рис., две засечки). Такой способ торможения нашел широкое применение в приводе рудничных электровозов, ходового механизма роторных экскаваторов и др.
Торможение противовключением осуществляется, как и у двигателей параллельного возбуждения, двумя способами: включением в цепь якоря реостата с большим сопротивлением и изменением полярности обмотки якоря.
При первом способе механическая характеристика будет продолжением характеристики двигательного режима (см. рис. 7, три засечки в квадранте IV). При торможении противовключением по второму способу характеристика располагается в квадранте II (линия с тремя засечками).
Двигатель со смешанным возбуждением имеет две обмотки возбуждения: последовательную ОВпосл и параллельную ОВпар (см. рис.), которые совместно создают поток возбуждения машины.
Двигатели со смешанным возбуждением допускают все три режима электрического торможения: рекуперативное с отдачей энергии в сеть, динамическое и противовключением.
Для асинхронного двигателя возможны следующие режимы торможения: рекуперативное с отдачей энергии в сеть, противовключением и динамическое. Рекуперативное торможение с отдачей энергии в сеть происходит при угловой скорости выше синхронной (о). С сверхсинхронной скоростью ротор может вращаться, например, при спуске ковша экскаватора или при спуске груза лебедкой. В режиме рекуперативного торможения момент и ток ротора имеют отрицательные знаки, и машина работает в режиме асинхронного генератора, превращая механическую энергию, сообщаемую валу машины спускающимся грузом, в электрическую и отдавая ее в сеть. Механическая характеристика этого режима является продолжением характеристики двигательного режима и располагается во // квадранте (см. рис.).
Режим торможения противовключением аналогичен соответствующему режиму двигателя постоянного тока с независимый возбуждением. Этот режим, может быть, достигнут двумя путями:
1) увеличением сопротивления реостата в цепи ротора. В точке, а момент двигателя меньше момента статического сопротивления и поэтому груз увлекает за собой ротор в направлении, обратном направлению вращения магнитного поля статора. Это вызывает быстрое возрастание э.д.с., тока ротора и тормозного момента. В точке в момент, создаваемый опускающимся грузом, и тормозной момент двигателя уравновешиваются и скорость опусканий становится постоянной. При необходимости ускорения опускания груза в цепь ротора вводят следующую ступень реостата реверсом, т, е. переключением двух фаз статора. В результате вращающееся поле статора изменяет направление вращения, а ротор по инерции вращается в прежнем направлении. Ток и момент при этом изменяют свои знаки: момент становится тормозным, что вызывает быструю остановку двигателя. Вследствие встречного вращения ротора и поля статора э.д.с. ротора достигает большой величины. Для ограничения броска тока при переходе в режим противовключения в цепь фазного ротора двигателя вводят ступень противовключеиия.
Лабораторная работа №3.
Механическая характеристика электродвигателей постоянного тока с последовательным возбуждением
--> ЧИТАТЬ ПОЛНОСТЬЮ <--