Лабораторная работа: Исследование асинхронного исполнительного двигателя с полным немагнитным ротором
- Большой немагнитный зазор в магнитной цепи машины (![]() ), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности (
), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности (![]() ).
).
- Значительное электрическое сопротивление ротора и, как следствие, работа двигателя при больших скольжениях, что приводит к увеличению потерь энергии в статоре и роторе, а также к снижению КПД.
- Относительно увеличенные удельные (то есть приходящиеся на единицу полезной мощности) масса и габариты двигателя.
3. Конструкция АИД
Конструкция АИД должна решать задачу преобразования электрической энергии в механическую, приводящую во вращение вал двигателя с присоединённой нагрузкой (объектом управления). Это преобразование в общем виде описывается законом электромагнитного усилия, который утверждает, что механическая сила возникает при взаимодействии одноимённых полей (электрических или магнитных) и приложена к инерционным источникам этих полей.
В электромагнитных устройствах систем управления взаимодействуют два магнитных поля, причём одно поле должно создаваться той частью машины, которая будет вращаться, а источник второго поля может быть неподвижным. Поэтому в конструкции любой электрической машины имеется неподвижная часть- статор и подвижная- ротор.
В данной лабораторной работе исследуется АИД переменного тока с полым немагнитным ротором. Схема его конструкции показана на рисунке 1, а макет имеется на рабочем столе возле лабораторного стенда.
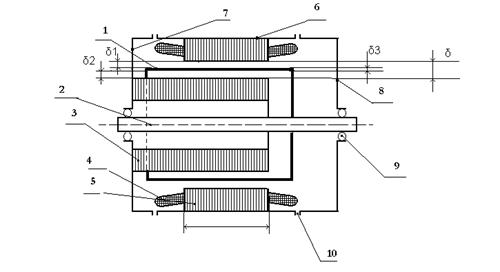
Рисунок 1 - Схема конструкции асинхронного исполнительного двигателя с полым немагнитным ротором
Неподвижная часть машины состоит из внешнего магнитопровода 5 с обмотками 4,внутреннего магнитопровода 3, корпуса 6, левого 7 и правого 8 подшипниковых щитов с подшипниками 9 и узлов 10 соединения корпуса со щитами. Подвижная часть машины содержит вал 2 с жёстко укреплённым на нём тонкостенным цилиндром 1. Внешний магнитопровод 5 неявнополюсный, представляет собой стальное кольцо собранное из листовой электротехнической стали, по внутренней поверхности которого расположены пазы, в которые укладываются две распределённые обмотки, изготовленные из изолированного медного провода круглого или прямоугольного сечения. Оси этих обмоток смещены в пространстве на 90 электрических градусов. Внутренний магнитопровод 3 также неявнополюсный,набран из листов электоротехнической стали и укреплён на цилиндрическом выступе одного из подшипниковых щитов 7. Он служит для уменьшения магнитного сопротивления на пути рабочего магнитного потока машины и не имеет пазов и обмоток.
В микродвигателях, мощность которых не превышает 1.5 Вт, диаметр расточки статора (внутренний диаметр внешнего магнитопровода 6) мал и для облегчения укладки обмоток пазы выполняют по внешней поверхности внутреннего магнитопровода 3. При этом его диаметр несколько увеличивают для увеличения обмоточного пространства. Иногда одну из обмоток размещают на внешнем, а другую на внутреннем магнитопроводе.
Корпус и подшипниковые щиты в микромашинах выполняются из алюминиевых сплавов. В крупных машинах эти части конструкции выполняются обычно сварными из стальных листов необходимой толщины, реже литыми. Подшипники чаще всего используются шариковые качения, а в крупных машинах - роликовые. Если от двигателя требуется бесшумная работа, применяют подшипники скольжения – бронзовые или бронзографитные. В микромашинах используются полузакрытые пазы для укладки обмоток – рисунок 2. Внутреннюю поверхность паза изолируют 1, заполняют проводниками обмотки 2 и закрепляют проводники деревянными или пластмассовыми клиньями 3. На рисунке 2 показан паз, выполненный на внешнем магнитопроводе, если же его выполнять на внутреннем магнитопроводе, то граница пройдёт по штриховой линии.
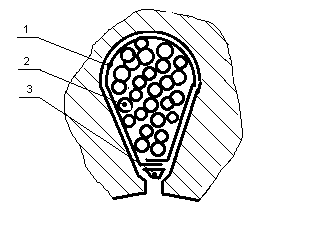
Рисунок 2 - Полузакрытый паз магнитопровода
Особенностью рассматриваемого двигателя является конструкция его ротора. Вал ротора 2 свободно вращается в подшипниках 9. На валу жёстко укреплён тонкостенный цилиндр 1, который также именуется стаканом. Стакан выполняется из немагнитного токопроводящего материала, как правило, из алюминиевых сплавов. Данная технология используется для получения минимальной механической инерционности двигателя, то есть для снижения его постоянной времени. Толщина стенок зависит от мощности двигателя и составляет ![]() мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода
мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода ![]() мм. Общий воздушный зазор в двигателе
мм. Общий воздушный зазор в двигателе![]() мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт.
мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт.
4. Магнитные поля АИД
Схема включения асинхронного исполнительного двигателя с полым немагнитным ротором показана на рисунке 3.
Теория вращающихся электромеханических преобразователей энергии показывает, что общее требование к работоспособной электрической машине заключается в том, чтобы магнитные поля ротора и статора обладали одинаковым количеством пар полюсов и были неподвижны относительно друг друга при работе машины в установившемся режиме. Значит, если поле ротора вращается, то для обеспечения неподвижности относительно него, поле статора тоже должно вращаться. Поле статора создаётся токами, протекающими по двум его обмоткам. Одна из них называется обмоткой возбуждения ОВ и постоянно находится под напряжением ![]() . Втораяобмотка расположена перпендикулярно обмотке возбуждения и называется обмоткой управления ОУ. Напряжение
. Втораяобмотка расположена перпендикулярно обмотке возбуждения и называется обмоткой управления ОУ. Напряжение ![]() на обмотку
на обмотку
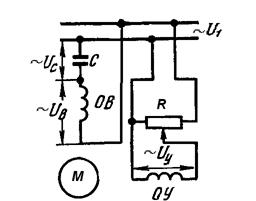
Рисунок 3 - Схема включения АИД
управления подаётся от устройства управления лишь в том случае если необходимо вращение ротора. Такая машина называется двухфазной. Чтобы эти две обмотки создавали вращающееся поле, их необходимо питать токами ![]() и
и ![]() , сдвинутыми относительно друг друга во времени (по фазе). Процесс создания вращающегося поля в двухфазной машине, когда обмотки статора сдвинуты в пространстве на 90 электрических градусов и питаются токами, сдвинутыми по фазе на 90 градусов, показан на рисунке 4. В момент времени t=t0 суммарное поле
, сдвинутыми относительно друг друга во времени (по фазе). Процесс создания вращающегося поля в двухфазной машине, когда обмотки статора сдвинуты в пространстве на 90 электрических градусов и питаются токами, сдвинутыми по фазе на 90 градусов, показан на рисунке 4. В момент времени t=t0 суммарное поле ![]() равно полю возбуждения
равно полю возбуждения ![]() , так как ток
, так как ток ![]() максимален, а ток
максимален, а ток ![]() в обмотке управления в этот момент равен нулю. В момент t=t1 имеем wt=45°,
в обмотке управления в этот момент равен нулю. В момент t=t1 имеем wt=45°, ![]() ,
, ![]() ,
, ![]() . При t=t2 имеем wt=90°,
. При t=t2 имеем wt=90°, ![]() ,
, ![]() ,
, ![]() и т. д. Очевидно, суммарный вектор
и т. д. Очевидно, суммарный вектор ![]() по величине остаётся неизменным и равным
по величине остаётся неизменным и равным ![]() , а по направлению
, а по направлению

Рисунок 4 - Создание вращающегося магнитного поля двухфазным статором
вращается против часовой стрелки. Скорость вращения w1 или n 1 результирующего поля статора определяется частотой питающей сети f1 и числом пар полюсов обмоток статора p :
 (1)
(1)
Поле статора ![]() создаёт поток, большая часть которого
создаёт поток, большая часть которого ![]() выходит из внешнего магнитопровода, пересекает воздушный зазор δ1- рисунок 1, затем стенку ротора δ3, воздушный зазор
выходит из внешнего магнитопровода, пересекает воздушный зазор δ1- рисунок 1, затем стенку ротора δ3, воздушный зазор ![]() , проходит по внутреннему магнитопроводу, снова проходит воздушные зазоры и стенку ротора, входит уже с другой стороны диаметра во внешний магнитопровод и замыкается по нему. Данный поток именуется основным потоком обмоток статора. Меньшая часть поля статора
, проходит по внутреннему магнитопроводу, снова проходит воздушные зазоры и стенку ротора, входит уже с другой стороны диаметра во внешний магнитопровод и замыкается по нему. Данный поток именуется основным потоком обмоток статора. Меньшая часть поля статора ![]() сцепляется только с витками обмоток статора и называется потоком рассеивания статора, который определяет индуктивные сопротивления обмоток статора.
сцепляется только с витками обмоток статора и называется потоком рассеивания статора, который определяет индуктивные сопротивления обмоток статора.
Основной поток статора, вращаясь, пересекает стенки стакана ротора и индуцирует в них ЭДС, под действием которой в роторе начинают протекать значительные электрические токи, так как материал ротора токопроводящий с незначительным электрическим сопротивлением. Эти токи создают собственное магнитное поле, которое вызывает основной магнитный поток ![]() ротора, сцеплённый с обмотками статора и ротора, а также поток рассеивания ротора -
ротора, сцеплённый с обмотками статора и ротора, а также поток рассеивания ротора -![]() , значительно меньший основного и сцеплённый только с ротором. Данный поток определяет индуктивность ротора.
, значительно меньший основного и сцеплённый только с ротором. Данный поток определяет индуктивность ротора.
Таким образом, в магнитопроводе асинхронного исполнительного двигателя существуют два магнитных поля: вращающееся поле ![]() неподвижного статора и поле
неподвижного статора и поле ![]() ротора, также вращающееся. Определим его скорость
ротора, также вращающееся. Определим его скорость ![]() относительно ротора, вращающегося со скоростью
относительно ротора, вращающегося со скоростью ![]() . Разность между скоростью вращения ротора и скоростью вращения поля статора называется частотой скольжения
. Разность между скоростью вращения ротора и скоростью вращения поля статора называется частотой скольжения ![]()
![]() ; (2)
; (2)