Лабораторная работа: Исследование асинхронного исполнительного двигателя с полным немагнитным ротором
![]() (3)
(3)
называется скольжением. Чтобы в роторе наводилась ЭДС ![]() , его скорость всегда должна быть меньше скорости поля статора. Чем больше разность скоростей, то есть чем больше
, его скорость всегда должна быть меньше скорости поля статора. Чем больше разность скоростей, то есть чем больше ![]() , тем больше ЭДС
, тем больше ЭДС ![]() и токи в роторе. Значит скольжение асинхронного двигателя, как и скорость вращения ротора зависят от нагрузки - с увеличением нагрузки ток ротора увеличиваеться, а скорость вращения уменьшаться. Из (3) и (1) имеем
и токи в роторе. Значит скольжение асинхронного двигателя, как и скорость вращения ротора зависят от нагрузки - с увеличением нагрузки ток ротора увеличиваеться, а скорость вращения уменьшаться. Из (3) и (1) имеем
![]() . (4)
. (4)
Частота ЭДС в роторе ![]() равна
равна
![]() . (5)
. (5)
Токи ротора, изменяясь с такой же частотой, создают поле ротора, которое вращается относительно ротора со скоростью ![]() в ту же сторону, что и ротор :
в ту же сторону, что и ротор :
![]() . (6)
. (6)
Скорость вращения поля ротора относительно статора ![]() равна сумме скоростей ротора
равна сумме скоростей ротора ![]() и скорости вращения поля относительно ротора
и скорости вращения поля относительно ротора ![]() :
:
![]() . (7)
. (7)
Значит, поле ротора неподвижно относительно статора и требование к работоспособности машины выполнено.
Поля ![]() и
и ![]() складываются в магнитопроводе и образуют основное поле двигателя, которое, как и в трансформаторе, при изменении нагрузки (а значит и полей
складываются в магнитопроводе и образуют основное поле двигателя, которое, как и в трансформаторе, при изменении нагрузки (а значит и полей ![]() и
и ![]() ) от нуля до номинального значения остаётся практически неизменным и примерно равным полю холостого хода
) от нуля до номинального значения остаётся практически неизменным и примерно равным полю холостого хода ![]() :
:
![]() . (8)
. (8)
5. Вращающий момент АИД
Взаимодействие магнитных полей статора и ротора приводит к появлению механического вращающего момента, приложенного как к статору, так и к ротору. Статор укреплён неподвижно и приложенный к нему момент компенсируется реакцией элементов крепления. Ротор установлен в шарикоподшипниках и начинает раскручиваться до некоторой установившейся скорости![]() , которая определяется условием равновесия твёрдого вращающегося тела: сумма механических моментов приложенных к телу должна быть равна нулю:
, которая определяется условием равновесия твёрдого вращающегося тела: сумма механических моментов приложенных к телу должна быть равна нулю:
![]() . (9)
. (9)
Весь процесс преобразования поданной на двигатель электрической энергии в механическую энергию вращения ротора с нагрузкой отображается схемой преобразований, приведенной на рисунке 5.
На электрические цепи возбуждения и управления подаются напряжения соответственно возбуждения ![]() и управления
и управления ![]() . Напряжение возбуждения неизменно и его можно считать питанием устройства, напряжение управления задается устройством управления. Поданные напряжения элементарными преобразователями ЭП1 и ЭП2 преобразуются в токи
. Напряжение возбуждения неизменно и его можно считать питанием устройства, напряжение управления задается устройством управления. Поданные напряжения элементарными преобразователями ЭП1 и ЭП2 преобразуются в токи ![]() и
и ![]() .
.

Рисунок 5 - Схема преобразований сигнала в АИД
Это преобразование описывается условием равновесия электрической цепи: сумма ЭДС, разностей потенциалов и падений напряжений в электрической цепи равна нулю (иначе, интегральная форма материального уравнения или закона Ома для электрической цепи, второе правило Кирхгофа), которое ![]() усл
усл![]() овно в ЭП1 и ЭП2 записано как
овно в ЭП1 и ЭП2 записано как ![]() . Токи, протекая по обмоткам, создают намагничивающие силы
. Токи, протекая по обмоткам, создают намагничивающие силы ![]() и
и ![]() – ЭП3 и ЭП4 (закон полного тока), действующие в магнитных цепях машины и складывающиеся во вращающееся поле
– ЭП3 и ЭП4 (закон полного тока), действующие в магнитных цепях машины и складывающиеся во вращающееся поле ![]() . Следующее преобразование ЭП5 приводит к появлению магнитного потока
. Следующее преобразование ЭП5 приводит к появлению магнитного потока ![]() и описывается условием равновесия магнитной цепи: сумма намагничивающих сил и падений магнитного напряжения в магнитной цепи равно нулю (второе правило Кирхгофа для магнитной цепи), что условно записано в ЭП5 как
и описывается условием равновесия магнитной цепи: сумма намагничивающих сил и падений магнитного напряжения в магнитной цепи равно нулю (второе правило Кирхгофа для магнитной цепи), что условно записано в ЭП5 как ![]() . Магнитный поток
. Магнитный поток ![]() вращается, пересекает ротор и согласно закону электромагнитной индукции наводит в нём ЭДС
вращается, пересекает ротор и согласно закону электромагнитной индукции наводит в нём ЭДС ![]() – ЭП6. В роторе возникает электрический ток
– ЭП6. В роторе возникает электрический ток ![]() , что также описывается условием равновесия электрической цепи - ЭП7. Этот ток создаёт свою намагничивающую силу
, что также описывается условием равновесия электрической цепи - ЭП7. Этот ток создаёт свою намагничивающую силу ![]() - ЭП8,которая действует в магнитопроводе машины и совместно с
- ЭП8,которая действует в магнитопроводе машины и совместно с ![]() определяют F в ЭП5. Взаимодействие полей
определяют F в ЭП5. Взаимодействие полей ![]() и
и ![]() согласно закона электромагнитного усилия создаёт механический вращающий момент
согласно закона электромагнитного усилия создаёт механический вращающий момент ![]() , что отображено элементом ЭП9 и условной записью в нём
, что отображено элементом ЭП9 и условной записью в нём ![]() . Вращающий момент и другие моменты, действующие на ротор – момент нагрузки
. Вращающий момент и другие моменты, действующие на ротор – момент нагрузки ![]() , демпфирующий момент
, демпфирующий момент![]() , динамический момент
, динамический момент![]() и момент трения
и момент трения ![]() , определяют скорость вращения ротора
, определяют скорость вращения ротора ![]() , что описывается уравнением равновесия твёрдого тела:
, что описывается уравнением равновесия твёрдого тела: ![]() - ЭП10. Скорость
- ЭП10. Скорость ![]() является выходным сигналом машины. Кроме того,
является выходным сигналом машины. Кроме того, ![]() совместно с Ф определяет величину ЭДС в роторе и поэтому подана на ЭП6. Цепи
совместно с Ф определяет величину ЭДС в роторе и поэтому подана на ЭП6. Цепи ![]() на ЭП5 и
на ЭП5 и ![]() на ЭП6 показывают наличие в двигателе внутренних отрицательных обратных связей. На рисунке 5 не показаны падения электрического напряжения на активных сопротивлениях цепей управления, возбуждения и ротора, ЭДС, индуцированные в обмотках возбуждения и управления потоком Ф, падение магнитного напряжения в магнитном сопротивлении магнитопровода. Эти преобразования носят вспомогательный характер, однако о них следует помнить и понимать, что они тоже являются отрицательными обратными связями, обеспечивающими устойчивую работу двигателя.
на ЭП6 показывают наличие в двигателе внутренних отрицательных обратных связей. На рисунке 5 не показаны падения электрического напряжения на активных сопротивлениях цепей управления, возбуждения и ротора, ЭДС, индуцированные в обмотках возбуждения и управления потоком Ф, падение магнитного напряжения в магнитном сопротивлении магнитопровода. Эти преобразования носят вспомогательный характер, однако о них следует помнить и понимать, что они тоже являются отрицательными обратными связями, обеспечивающими устойчивую работу двигателя.
Схема преобразований даёт качественную картину работы двигателя. Количественный анализ работы, основанный на законах, указанных на схеме, позволяет найти выражение для момента, развиваемого двигателем:
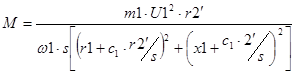 ; (10)
; (10)
где ![]() - число фаз обмотки статора;
- число фаз обмотки статора;
![]() ,
,![]() - активное и реактивное сопротивления обмотки статора;
- активное и реактивное сопротивления обмотки статора;
![]() ,
,![]() - активное и реактивное сопротивления ротора, приведённые к числам витков и фаз обмоток статора;
- активное и реактивное сопротивления ротора, приведённые к числам витков и фаз обмоток статора;
![]() - коэффициент приведения параметров АИД к Г-образной схеме замещения;
- коэффициент приведения параметров АИД к Г-образной схеме замещения;
Это выражение можно понимать так:
![]() (11)
(11)
где ![]() - электромагнитная мощность, передаваемая от статора к ротору магнитным полем, вращающимся с угловой скоростью
- электромагнитная мощность, передаваемая от статора к ротору магнитным полем, вращающимся с угловой скоростью ![]() .
.
Годограф вектора вращающегося поля статора может иметь вид окружности или эллипса. Поле будет круговым если выполнены условия: