Лабораторная работа: Основные параметры тяговых двигателей
Сопротивление обмоток главных полюсов при температуре 20 °С 0,025 Ом
Сопротивление обмоток дополнительных ПОЛЮСОВ и компенсационной обмотки при температуре 20 °С 0,0356
Сопротивление обмотки якоря при температуре 20 'С...0,0317 Ом
Система вентиляции........ независимая
Количество вентилирующего воздуха, не менее 95 м3/мин
К. п. д. в часовом режиме....... 0,931
К. п. д. в продолжительном режиме .... 0І930
Масса без шестерен ....... 5000 кг
5.3 Сравнительный анализ двигателей ТЛ-2К1 и НБ-418К6
Наибольшее распространение в промышленности получили электрические двигатели двух видов: переменного тока НБ-418К6 и постоянного тока ТЛ-2К1 с различными способами возбуждения.
Двигатели, которые могут быть использованы в качестве тяговых на электровозе, должны удовлетворять как минимум двум требованиям. Прежде всего, они должны допускать возможность регулирования в широких пределах частоты вращения. Это позволяет изменять скорость движения поезда. Кроме того, необходимо иметь возможность регулировать в широком диапазоне силу тяги, т. е. вращающий момент, развиваемый двигателем. Так, двигатели электровоза должны обеспечивать значительную силу тяги во время трогания поезда, его разгона, при преодолении крутых подъемов и т. п. и снижать ее при более легких условиях движения.
С точки зрения организации движения, казалось бы, желательно, чтобы поезда независимо от изменения сопротивления движению перемещались с постоянной скоростью или эта скорость снижалась бы незначительно. В этом случае зависимость между силой тяги Р и скоростью движения и (рис. 4, а) представляла бы в прямоугольных осях координат вертикальную прямую линию 1, параллельную оси Р, или слегка наклонную линию 2. Зависимость между силой тяги, развиваемой двигателями локомотива, и скоростью его движения называют тяговой характеристикой и представляют ее графически, как показано на рис. 4, или в виде таблиц.
Рисунок 4. жесткая (а) и мягкая (б) тяговые характеристики
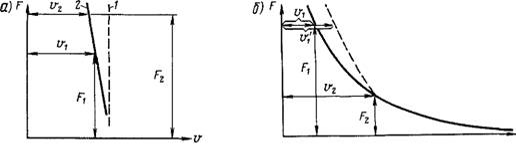
Изображенные на рис. 4, а тяговые характеристики являются жесткими. В случае жесткой характеристики мощность, потребляемая двигателями и равная произведению силы тяги на скорость, например, на крутых подъемах, возрастает пропорционально увеличению силы тяги. Резкое увеличение потребляемой мощности приводит к необходимости повышения мощности как самих двигателей, так и тяговых подстанций, увеличения площади сечения контактной подвески, что связано с затратами денежных средств и дефицитных материалов. Избежать этого можно, обеспечив характеристику двигателя, при которой с увеличением сопротивления движению поезда автоматически снижалась бы его скорость, т. е. так называемую мягкую характеристику (рис. 4, б). Она имеет вид кривой, называемой гиперболой. Двигатель с такой тяговой характеристикой работал бы при неизменной мощности. Однако при движении тяжелых составов на крутых подъемах, когда необходима большая сила тяги, поезда перемещались бы с очень низкой скоростью, тем самым резко ограничивая пропускную способность участка железной дороги. Примерно такой характеристикой обладают тепловозы, так как мощность их тяговых двигателей ограничена мощностью дизеля. Это относится и к паровой тяге, при которой мощность ограничивается производительностью котла.
Мощность, развиваемая тяговыми двигателями электровоза, практически не ограничена мощностью источника энергии. Ведь электровоз получает энергию через контактную сеть и тяговые подстанции от энергосистем, обычно обладающих мощностями, несоизмеримо большими мощности электровозов. Поэтому при создании электровозов стремятся получить характеристику, показанную на рис. 4, б штриховой линией. Электровоз, оборудованный двигателями с такой характеристикой, может развивать значительную силу тяги на крутых подъемах при сравнительно высокой скорости. Конечно, мощность, потребляемая тяговыми двигателями в условиях больших сил тяги, повышается, но это не приводит к резким перегрузкам питающей системы.
Двигатели ТЛ-2К1 самые распространенные. Достоинства их трудно переоценить: простота устройства и обслуживания, высокая надежность, низкая стоимость, несложный пуск. Однако, как известно, частота вращения асинхронного двигателя почти постоянна и мало зависит от нагрузки, она определяется частотой подводимого тока и числом пар полюсов двигателя. Поэтому регулировать частоту вращения таких двигателей, а, следовательно, и скорость движения поездов можно только изменением частоты питающего тока и числа пар полюсов, что трудно осуществить. Кроме того, как уже отмечалось выше, для питания таких двигателей требуется устраивать сложную контактную сеть.
Благодаря развитию полупроводниковой техники оказалось возможным создать преобразователи однофазного переменного тока в переменный трехфазный и регулировать их частоту.
В какой же степени отвечают требованиям, предъявляемым к тяговым двигателям, электрические машины постоянного тока? Напомним, что эти машины — генераторы и двигатели — различаются по способу возбуждения.
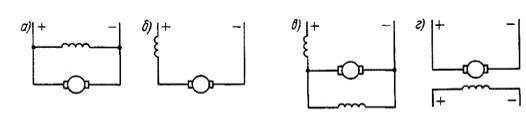
Обмотка возбуждения может быть включена параллельно обмотке якоря (рис. 5, а) и последовательно с ней (рис5, б). Такие двигатели называют соответственно двигателями параллельного и последовательного возбуждения. Используют также двигатели, у которых имеются две обмотки возбуждения — параллельная и последовательная. Их называют двигателями смешанного возбуждения (рис. 5, в). Если обмотки возбуждения включены согласно, т. е. создаваемые ими магнитные потоки складываются, то такие двигатели называют двигателями согласного возбуждения; если потоки вычитаются, то имеем двигатели встречного возбуждения. Применяют и независимое возбуждение: обмотка возбуждения питается от автономного (независимого) источника энергии (рис. 5, г).
Рисунок 5. Схемы, проясняющие способы возбуждения двигателей постоянного тока
Чтобы оценить возможности регулирования частоты вращения двигателя постоянного тока, напомним, что при вращении в магнитном поле проводников обмотки якоря двигателя в них возникает (индуцируется) электродвижущая сила (э. д. с). Направление ее определяют, пользуясь известным правилом правой руки. При этом ток, проходящий по проводникам якоря от источника энергии, направлен встречно индуцируемой э. д. с. Напряжение, подведенное к двигателю, уравновешивается э. д. с, наводимой в обмотке якоря, и падением напряжения в обмотках двигателя.
Значение э. д. с. пропорционально магнитному потоку и частоте вращения, с которой проводники пересекают магнитные силовые линии. Поэтому без ощутимой ошибки можно считать, порциональность) или магнитный поток возбуждения (обратная пропорциональность).
Как зависит вращающий момент от тока якоря? Если подключить проводники обмотки якоря двигателя к электрической сети, то проходящий по ним ток, взаимодействуя с магнитным полем полюсов, создаст силы, действующие на каждый проводник с током. В результате совместного действия этих сил создается вращающий момент М, пропорциональный току якоря и магнитному потоку полюсов.
Чтобы построить тяговую характеристику двигателя постоянного тока, необходимо установить, как изменяются частота вращения п и момент М в зависимости от тока при разных способах возбуждения двигателей.
Для двигателей с параллельным возбуждением можно считать, что ток возбуждения не изменяется с изменением нагрузки.
Примерно такие же характеристики будут иметь двигатели с независимым возбуждением, если не изменяется ток возбуждения.
Рассмотрим те же характеристики для двигателя с последовательным возбуждением (см. рис. 5, б). У такого двигателя магнитный поток зависит от нагрузки, так как по обмотке возбуждения проходит ток якоря. Частота вращения якоря обратно пропорциональна потоку и при увеличении тока якоря, а значит и магнитного потока, резко уменьшается (рис. 6, б). Вращающий момент двигателя, наоборот, резко возрастает, так как одновременно увеличиваются ток якоря и зависящий от него магнитный поток возбуждения.