Лабораторная работа: Расчет основных параметров правильно-натяжной машины
8. Расположение привода - правое
9. Давление воздуха в пневмополости ![]() - 3-5
- 3-5
10.Давление в гидросистеме ![]() - 50
- 50
11.Температура воздуха в цехе С - -10 - +50
12.Число часов работы в год - 7000
13.Смазка централизованная густой и жидкой смазки
14.Напряжение питания, В - переменное 220/380;
- постоянное 220
Описание устройства и его работа:
Ролики тянущие предназначены для транспортировки полосы, создания технологического натяжения и устанавливается в агрегате поперечной резки полос АПР 2,5-10*1000-2350. кинематическая схема роликов тянущих приведена на рисунке 1.
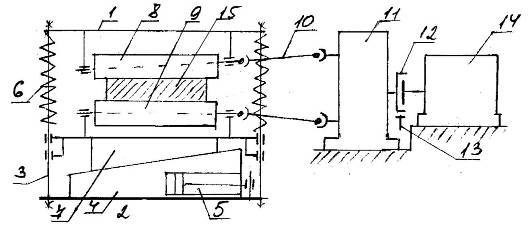
Рисунок 1 – Конструктивная схема тянущих роликов
1. верхняя траверса; 2. нижняя траверса; 3. стойка; 4. клин; 5. гидроцилиндр; 6. пружина; 7. подвижная траверса; 8,9. ролики; 10. шпиндель; 11. редуктор распределительный; 12. тормозной шкиф; 13. колодочный тормоз; 14. электро двигатель.
Ролики тянущие содержат рабочую клеть и привод. Рабочая клеть состоит из верхней 1 и нижней 2 траверсе жесткосоединенные между собой по средствам стоек 3, на которых с возможностью перемещения в вертикальной плоскости с помощью клина 4 с гидроцилиндром 5 и пружин сжатия 6, установлена подвижная траверса 7. на траверсах 1 и 7 смонтированы ролики 8 и 9, срединные с приводом состоящим из шпинделей 10 карданного типа, распределительного редуктора 11, втулочно – кольцевой эластичной муфты с тормозным шкифом 12, колодочного тормоза 13, и эл.двигателя 14.
В исходном положении, когда транспортируемая полоса 15 отсутствует ролики 8 и 9 “раскрыты”, что соответствует зазору между ними значительно превышающего толщину полосы.
Ролики тянущие работают следующим образом: при входе переднего конца полосы 15 в рабочую зону с помощью гидроцилиндра 5 клин 4 перемещают в горизонтальной плоскости, перемещая при этом в вертикальной плоскости подвижную траверсу 7 с роликом 9 в сторону сближнгия с роликом 8 и зажимая при этом, полосу 15. затем с помощью эл.двигателя 14, тормоза 12, распределительного редуктора 11 и шпинделей 10 роликом 8 и 9 задается вращение в нужном направление с заданной скоростью обеспечивая необходимое тянущее усилие полосы 15 при её транспортировании.
Определение основных параметров
Возможность захвата полосы роликами определяется исходя из наибольшей толщины транспортируемой полосы. Схема захвата полосы представлена на рисунке 2.
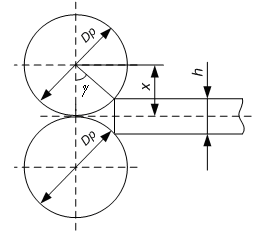
Рисунок 2 – Схема захвата полосы
1 Выбор диаметра роликов
Исходя из опыта работающих машин диаметр бочки ролика принимается ![]() :
:
![]() .
.
С учётом полосы, которая транспортируется, (![]() ) длина бочки ролика определяется:
) длина бочки ролика определяется:
![]() .
.
Коэффициент трения-скольжения по поверхности бочки ролика равен: ![]() .
.
Угол трения:
![]() .
.
загрузочный полосовой металл привод