Реферат: Адаптивные сборочные робототехнические комплексы (РТК)
В том случае, когда требуется особо высокая точность взаимного положения собираемых элементов, сборочные ПР оснащают системами адаптивного управления. ПР с адаптивным управлением работает следующим образом: сначала производятся грубые и быстрые перемещения рук ПР по заданной программе, а затем точные перемещения соединяемых деталей с использованием обратной связи. При применении ПР с адаптивным управлением необходимость в строгом предварительном ориентировании деталей в значительной степени снижается. Такие ПР обеспечивают значительное повышение точности позиционирования устанавливаемых деталей, поскольку они могут получить информацию об окружающей их обстановке, переработать ее в блоке управления и соответственно отреагировать.
При этом используются различные устройства взаимного ориентирования, когда управление ПР осуществляется датчиками на основе полученной ими информации о силах и моментах, действующих в процессе соединения деталей.
В настоящее время широкое применение нашли устройства, в которых метод статического воздействия основан на показаниях датчиков, например тензодатчиков, индуктивных и др. Работа этих устройств в определенной мере напоминает сборку вручную ощупыванием, когда сенсорные элементы пальцев определяют величину и направление реакции, возникающей при сопряжении, вследствие чего появляется возможность устранить смещение и провести сборку. Такие ориентирующие устройства получили название ощупывающие.
Хорошо зарекомендовали себя также пневматические и фотоэлектрические устройства взаимного ориентирования. Разрабатываются и внедряются в производство телевизионные ориентирующие устройства, голографические, экстремальные.
2. Ориентирование ощупыванием
Одно из устройств такого принципа действия было разработано фирмой Hitachi (Япония). Устройство входит составной частью в сборочный манипулятор типа HI-T-HAND. При введении сопрягаемых деталей в контакт по торцам может возникнуть перекос вала, направленный в сторону отверстия. Чувствительные элементы, обычно тензодатчики, регистрируют этот перекос, выдавая на исполнительные механизмы сигналы на корректировку положения вала.
В подобных устройствах в качестве датчиков очувствления (датчиков обратной связи) можно использовать различные преобразователи. Например, пневматические струйные преобразователи, преобразователи типа сопло-заслонка. В последних модификациях манипуляторов в процессе ориентирования перемещаются обе сопрягаемые детали, что делает систему ориентирования более гибкой.
Определить возникшее угловое смещение можно также с помощью индуктивных преобразователей. Принцип действия их заключается в том, что одновременно измеряются два выходных параметра при перемещениях подвижной части преобразователя в двух направлениях. Этот преобразователь состоит фактически из двух перпендикулярно расположенных друг к другу индукционных преобразователей, имеющих один общий якорь. Якорь подвешен в центре шаровой оперы и имеет две степени свободы.
Для опознавания смещения деталей можно использовать также электроконтактные преобразователи.
3. Пневматические устройства
На рис. 2.6 показана конструкция устройства относительного ориентирования. Деталь 6 подводится снизу под захват, укрепленный с помощью плоских пластинчатых пружин 19 и 24 к мембранным приводам 22 и 14. Сверху на колонне 16 размещена консоль 1, несущая толкатель 2. Толкатель выводит валик 4 из лотка 3 и вводит его в захват между губками 7 и 5. Губки поворачиваются друг относительно друга на оси 8 и сжимаются пружиной 9.
Если валик 4, перемещаясь вниз, не попадает в отверстие детали 6, а упирается в ее торец, то толкатель 2 смещается относительно консоли вверх и открывает золотник (на рисунке не показан), который открывает подачу сжатого воздуха в распределитель 17. Последний связан с воздушной магистралью посредством штуцера 18.
Из верхней полости распределителя воздух поступает через входные сопла 29 в отсеки 23, а затем в полости мембранных приводов 22 и 14 по шлангам. Кроме того, из отсеков 23 воздух поступает о выходные отверстия 25-28, выполненные в губках 5 и 7. Соединения выполнены так, что выходные отверстия 26 и 28 связаны шлангами с полостями привода 14, а отверстия 25 и 27 - с полостями привода 22.
В зависимости от расположения валика 4 поступление воздуха через отверстия 25-28 будет различным и, следовательно, силы, действующие на мембраны приводов 14 и 22, также будут различными. Штоки 21 этих приводов, перемещаясь в результате разности давлении в их полостях, подводят валик к отверстию.
После центрирования валик под действием толкателя 2 входит в отверстие. Собранные детали отводятся после сборки вниз или вправо, губки раскрываются, пропуская валик. При отводе собранных деталей вниз толкатель остается в крайнем нижнем положении, не давая валику выйти из отверстия. Когда детали удалены, консоль с толкателем уходят вверх, воздух из приводов стравливается. На место валика 4 по лотку 3 выходит новый валик, а на место детали 6 подается другая деталь. Цикл повторяется.
Данное устройство может первоначально устанавливать захват по центру отверстия. После этого толкатель вводит в захват валик, который сразу попадает в сопрягаемое отверстие. Если сборка по какой-либо причине не произошла, толкатель останавливается, сжав предохранительную пружину, расположенную в консоли. Переналадка устройства состоит в смене губок.
4. Фотоэлектрические устройства
В настоящее время разработаны разные по конструкции и принципу действия фотоэлектрические устройства относительного ориентирования, обеспечивающие сборку различных по размеру и по форме деталей. Они характеризуются высокой надежностью и точностью.
Простейшая принципиальная схема ориентирования изображена на рис. 2-7.а Согласно схеме, световое пятно от источника 1 фокусируется оптической системой 2 на поверхности детали (втулки) 3 и после отражения направляется системой 4 на фотоэлемент 5. При смещении детали влево (вдоль оси X) в некоторый момент времени прекращается поступление света на фотоэлемент. Это вызывает срабатывание исполнительного приводного органа, перемещающего базу (на рисунке не показана), на которой находится втулка.
Использование аналогичной схемы, при которой деталь перемещается вдоль оси У, позволяет расположить центр отверстия втулки в строго заданном положении. Схема конструкции такого устройства представлена на рис. 2.7,б. В этой конструкции источник света 1 с оптической системой 2, а также элемент 5 с системой 4 размещены на кронштейнах захватов 6, удерживающих вал 7. Устройство определяет положение сопрягаемого с валом отверстия втулки 3 и через систему промежуточных преобразователей и двигателей выводит вал в положение, при котором возможно соединение деталей. Фокусировка светового луча на торце втулки производится с помощью этого же устройства и основывается на экстремальном методе контроля.
5. Акустические устройства
Определение относительного положения собираемых деталей с помощью акустических средств может осуществляться самыми разнообразными путями. В одном из таких устройств относительное положение деталей регистрируется и оценивается с помощью группы детекторов (микрофонов или акустических головок), включенных в систему управления положением деталей (рис. 2.8). На кронштейнах 3, прикрепленных к захвату 5, установлены на равных расстояниях от захвата микрофоны (акустические головки) 2 и 7, включенные в систему управления по дифференциальной схеме. Аналогичные микрофоны располагаются также в плоскости, перпендикулярной к плоскости чертежа и проходящей через ось захвата, в котором располагается валик 6. Привод 4 перемещает захват с валиком вниз по стрелке А, Он сообщает захвату осевые колебания с амплитудой 0,1 мм. В момент встречи валика с втулкой 1, например в точке О, возбуждается акустическая волна, которая при приведенном на рисунке относительном положении валика и втулки достигает головки 2 раньше, чем головки 7. Суммируемый в устройстве сравнения сигнал вырабатывает соответствующие команды, включающие исполнительные механизмы, устраняющие образовавшееся смещение.
Управляющий сигнал в устройстве сравнения определяется фазой сигналов в головках 2 и 7 и ее знаком. Аналогично действует система ориентирования и в направлении, перпендикулярном к рассмотренному. Причем исполнительные механизмы, устраняющие смещение, действуют до тех пор, пока сигнал в устройстве сравнения не станет равным нулю, что означает совмещение осей собираемых деталей поданной координате. Затем привод вертикальной подачи вводит валик в отверстие втулки.
Данное устройство может иметь в качестве чувствительных органов, опознающих смещение, пьезоэлектрические элементы, вмонтированные непосредственно в захват и расположенные накрест.
6. Инфракрасные устройства
Устройства такого типа характеризуются высокой чувствительностью и простотой реализации. Схема устройства с приемником инфракрасного излучения представлена на рис. 2.9. Сопрягаемая с валом 2 деталь 3 располагается на сборочной позиции над приемником инфракрасного излучения, а вал 2 - в захвате головки 1, управляемой исполнительными механизмами ИМ, которые обеспечивают движения по четырем координатам: трем линейным X, У и Z и одной угловой ![]() .
.
Тепловое излучение от торца вала через линзу 5 попадает на приемник излучения 6, который через усилитель 7 связан с оптимизатором (экстремизатором) 8, управляющим исполнительными механизмами ИМ.
Захваченный головкой вал при перемещении на сборочную позицию перемещается над нагревателем 4, который, посылая кратковременные тепловые импульсы, нагревает торец на 5- 10° выше температуры окружающей среды. Затем вал размещается над позицией сборки.
Тепловое излучение вала фиксируется приемником 6, причем величина этого излучения зависит от относительного положения вала и отверстия в детали 3. При наличии смещения сопрягаемых поверхностей выходной сигнал ниже, чем в ориентированном положении, т. е. характеристика регистрируемого приемником излучения имеет экстремальный характер.
Первоначально устройство ИМ![]() ориентирует вал относительно отверстия по углу поворота
ориентирует вал относительно отверстия по углу поворота ![]() , а после этого включаются приводы ИМХ, и ИМУ, ориентирующие вал по координатам X и У. Процесс ориентирования по каждой из координат прекращается в тот момент, когда экстремизатор зафиксирует максимальную за данный цикл интенсивность излучения от торца вала. По окончании ориентирования исполнительный механизм HMZ вводит вал в отверстие детали 3, и собранная сборочная единица удаляется. На этом цикл сборки заканчивается.
, а после этого включаются приводы ИМХ, и ИМУ, ориентирующие вал по координатам X и У. Процесс ориентирования по каждой из координат прекращается в тот момент, когда экстремизатор зафиксирует максимальную за данный цикл интенсивность излучения от торца вала. По окончании ориентирования исполнительный механизм HMZ вводит вал в отверстие детали 3, и собранная сборочная единица удаляется. На этом цикл сборки заканчивается.
Поскольку в систему введен экстремизатор, изменение температуры излучающего торца никак не сказывается на точности измерений. Следует отметить, что выпускаемые промышленностью радиометры, предназначенные для дистанционного измерения интенсивности светового излучения разных объектов, могут быть использованы для целей относительного ориентирования. В состав радиометров входят такие элементы, как приемник, оптическая система, фокусирующая излучение детали на чувствительную площадку приемника, электронная схема, служащая для преобразования, усиления и измерения сигнала с выхода приемника.
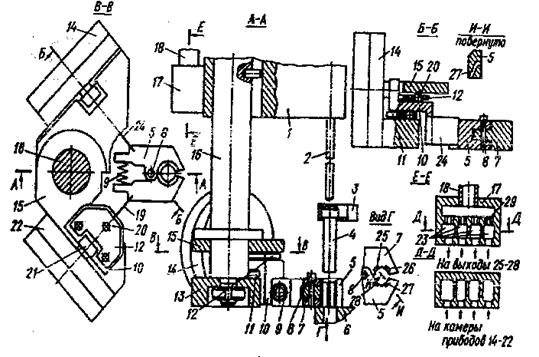
Рис. 2.6 - Пневматическое устройство относительного ориентирования
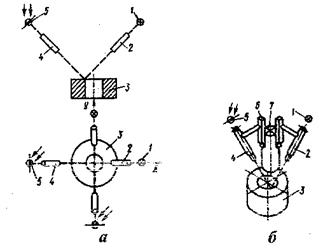
Рис. 2.7 - Ориентирование фотоэлектрическим методом: а – схема ориентирования; б – крепление ориентирующих органов к захвату
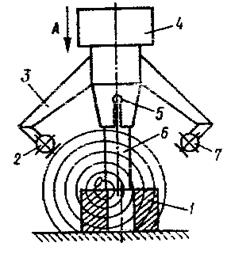

Рис. 2.8 - Схема акустического Рис. 2.9 - Схема инфракрасного
ориентирующего устройства устройства для ориентирования
7. Телевизионные устройства
Как и ранее рассмотренные, телевизионные устройства относительного ориентирования относятся к группе бесконтактных устройств универсального действия. Схема одного из них приведена на рис. 2.10. Устройство используется для определения положения центра отверстия сопрягаемой с валом детали, выдачи соответствующих сигналов на исполнительные механизмы сборочной головки и корректировки ее положения.
Устройство содержит передающую телевизионную трубку 3, соединенную своим выходом через усилитель-формирователь 10 с триггерами 2, 7 и 16. При подаче питания на устройство триггер 16 автоматически устанавливается в состояние «0». Напряжение низкого уровня с этого триггера размыкает ключ 11, и сигнал, поступающий на его вход с резистора R1, на выходе отсутствует. Таким образом, обеспечивается работа в режиме поиска. В этом режиме генераторы 4 и 5 вырабатывают отклоняющие токи симметричной треугольной формы с частотами близкими, но не равными но величине. Амплитуды этих токов подбираются таким образом, чтобы скорости движения сканирующего пятна относительно осей X и У были одинаковыми. При этом пятно движется всегда под углом к осям X или У, описывая крестообразный растр. Траектория 19 пятна представлена на рис. 2.10, б.
Работа генераторов 4 и 5 (рис. 2.10, а) основана на интегрировании напряжения, поступающего с триггеров-расширителей 2 и 7. Когда токи в отклоняющих катушках 8 и 9 достигают верхнего порогового уровня, срабатывают пороговые устройства 7 и 6, триггеры опрокидываются и отклоняющие токи начинают убывать. При достижении отклоняющими токами нижнего порогового уровня снова срабатывают пороговые устройства, и процесс повторяется.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--