Реферат: Анализ криптостойкости методов защиты информации в операционных системах Microsoft Window 9x
На следующем шаге, получив линейные аппроксимации, в матричной форме записывают базовые уравнения комбинирующего узла с памятью
St+1 = ASt + BXt + (Xt, St), t≥0,
yt = CSt + DXt + (Xt, St), t ≥0,
где векторы рассматриваются как матрицы-столбцы; A, B, C, D - двоичные матрицы; а и каждый компонент в D = (d1, . . . , dM) – несбалансированные булевы функции, именуемые функциями шума. Основная идея состоит в том, чтобы рассматривать {(Xt ,St)}t=0 и {(Xt ,St)}t=0 , 1≤i≤M, в качестве входных последовательностей, так что последние уравнения оказываются задающими неавтономную линейную машину с конечным числом состояний или ЛПС, именуемую АЛПС комбинирующего узла с памятью. Тогда можно решать эту ЛПС с использованием техники производящих функций (D-преобразований). В частности, пусть S, X, , , y обозначают производящие функции от переменной z для последовательностей {St}, {Xt}, (Xt, St)}, (Xt, St)}, yt}, соответств
енно. Тогда уравнения сводятся к виду
Р
ешение имеет вид
где I - единичная матрица, det(zA - I) = (z), (0) = 1, - многочлен, обратный к характеристическому многочлену матрицы переходов A степени, не превышающей ранг A (≤M); а элементы (присоединенной) матрицы adj(zA - I) - это полиномы от z степени не более M-1. Вычислительная сложность для отыскания такого решения составляет O(M3(N+1)). В другом виде решение можно переписать как
г
![]()
де xi и j обозначают производящие функции для {xit} и {j(Xt, St)}, а степени полиномов gi(z) и hj(z) самое большее равны M и M-1, 1≤i≤N, 1≤j≤M, соответственно. Полагая
решение можно преобразовать к виду:
г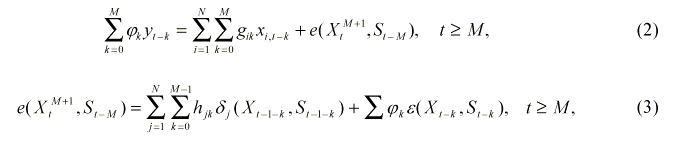
де подразумевается, что вектор состояния St-k - это функция от (Xt-k-1M-k, S t-M) для каждого 0≤k≤M-1. Линейные функции входа и выхода в (2) скоррелированы тогда и только тогда, когда функция шума e несбалансирована. Коэффициент корреляции не зависит от времени, если функция следующего состояния сбалансирована. Если это условие не удовлетворяется, то корреляционный коэффициент может зависеть от времени, поскольку от St более не требуется сбалансированность для каждого t≥0. Функция шума e в (3) определена как сумма индивидуальных шумовых функций, которые несбалансированы при условии, что сбалансирована функция следующего состояния. Поскольку от индивидуальных шумовых функций не требуется быть независимыми, в принципе нельзя исключать возможность, что коэффициент корреляции e с константной нулевой функцией равен нулю или очень близок к этому значению.
В рассматриваемом случае индивидуальные шумовые функции можно трактовать как булевы функции от n = MN + N + M переменных в (XM+1t , St -M). Следовательно, за исключением некоторых особых случаев, в общем случае можно с высокой вероятностью ожидать, что общий корреляционный коэффициент очень близок к произведению индивидуальных и, таким образом, отличается от нуля. Соответственно, метод АПЛС не только с высокой вероятностью дает взаимно коррелированные линейные функции от входа и выхода, но также позволяет оценить значение соответствующего корреляционного коэффициента, используя независимость или другие вероятностные предположения. Поскольку в идеальном случае хотелось бы получить такие АЛПС, в которых корреляционные коэффициенты по абсолютному значению близки к максимуму, то индивидуальные корреляционные коэффициенты должны быть крупными по величине, а количество шумовых членов в (3) должно быть маленьким. Конечно, эти требования могут противоречить друг другу. Поэтому хорошим подходом будет повторение процедуры АЛПС несколько раз, начиная с наилучших линейных аппроксимаций для функции выхода и компонент функции следующего состояния. Эта процедура может также выполняться для всех возможных линейных аппроксимаций, что представляется единственным систематическим способом проверить все корреляции, выявленные в процессе применения метода АЛПС. В общем случае имеется самое большее (M+1)2M+N таких линейных аппроксимаций. Однако, в принципе всегда можно проверить все возможные линейные аппроксимации даже при большом M, поскольку в практических реализациях функции выхода и следующего состояния зависят от сравнительно небольшого количества переменных или же составлены из таких булевых функций.
С практической точки зрения данная линейная модель может быть использована для выделения по шифротексту генератора RC4 среди других криптосистем, а также для восстановления параметра n. В 2000 году была опубликована статья Скотта Флюера и Дэвида Мак-Гри посвященная статистистическому анализу потокового генератора RC4, в которой были использованы результаты работы Голича для нахождения значения компонент S-бокса. Приблизительное время работы этого метода составляет 26n, где n – порция битов в выходном потоке, длина выходной последовательности, требуемая для выявления статистической слабости, близка к 230. Полученный результат указывает на существенную слабость генератора и возможность восстановить параметры i и n. S-бокс может принимать 2nk, где nk – число битов ключа.
2. Защита информации в операционных системах Microsoft Windows 9x
2.1 Аутентификация, безопасность и доступ к ресурсам в операционных системах семейства Microsoft Windows 9x
В операционных системах Microsoft Windows 9x для аутентификации пользователя используется имя пользователя, а для подтверждения введенного имени – процедура аутентификации, использующая символьный пароль пользователя. Алгоритм этой процедуры, которая вызывается из библиотеки MSPWL32.DLL, состоит из следующих шагов:
Шаг 1. Пользователь вводит свое имя и пароль в формате Unicode.
Шаг 2. Имя и пароль преобразуется в формат ASCII, причем строчные буквы преобразуются в прописные.
Шаг 3. Осу?