Реферат: Датчики перемещений
Одним из узлов, определяющих точность работы любой системы позиционирования, являются датчики перемещения. Датчики перемещений предназначены для преобразования величины линейного перемещения или угла оборота ходового винта в унитарный код: простую последовательность одинаковых по длительности и амплитуде электрических импульсов, число которых прямо пропорционально величине углового или линейного перемещения.
Индуктивные датчики
Для преобразования непрерывно изменяющейся величины в дискретные электрические импульсы широко применяются индуктивные и оптические датчики.
Схема индуктивного датчика показана на рисунке 1.
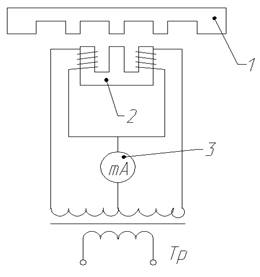
Рисунок 1 - Схема индуктивного датчика.
На подвижной части станка устанавливается тонкая рейка из магнитомягкого материала. Выступы рейки 1 модулируют магнитное сопротивление рабочего зазора при движении. Магнитопровод Ш-образного сердечника 2 имеет две обмотки, включенные навстречу друг другу и питаемые от трансформатора Тр. В диагональ индуктивного моста включен измерительный прибор. В среднем положении измерительный мост сбалансирован и стрелка прибора 3 будет стоят на нуле. Незначительный разбаланс приводит к отклонению стрелки прибора. Хорошо выполненный датчик улавливает перемещения ~2 мкм. Для дискретных схем необходим цифроаналоговый преобразователь (ЦАП).
Фотооптические датчики перемещений .
На ходовом винте располагается диск с большим числом щелей (от 100 до 800). Свет от лампы через цилиндрическую линзу в виде узкого пучка направляется на диск и фотоприемник (фотодиод). При шаге ходового винта 2 мм и количестве щелей на диске 400 каждому электрическому импульсу будет 5. иметь дискретность ~0,001 мм число щелей возрастает до 2000 и диаметр диска возрастает до 600 мм, что неприемлемо.
Можно устанавливать счетный диск не на ходовом винте, а на связанный с ним быстроходный вал. Но при этом уменьшится точность отсчета из-за погрешности передачи.
Прецизионные датчики линейных перемещений
Прецизионные датчики линейных перемещений строятся на основе растровых шкал, метрологических дифракционных решеток и лазерных интерферометров. Первые два вида ДЛП строятся на одинаковом принципе контроля перемещений. Они имеют длинную шкалу в виде периодически нанесенных штрихов и визирную короткую шкалу с таким же или кратным периодом штрихов и отверстий. Если пространственная частота расположения штрихов на шкалах не превышает 50-100 мм-1 , они называются растровыми шкалами, а если выше 100 мм-1 – метрологическими дифракционными решетками (или дифракционными решетками). Так как дискретность перемещений часто бывает менее 1 мкм, то казалось бы, чем выше частота штрихов, тем легче конструировать схемы формирования электрических импульсов. Однако простая замена растровых шкал дифракционными решетками затрудняется рядом возникающих при этом эффектов, делающих ДЛП чувствительными к изменению расстояния между мерой и визирной шкалой, длиной волны и пр. Системы на основе растровых шкал дифракционных решеток имеют две разновидности – накапливающие системы и системы, использующие эффект муаровых картин.
Накапливающие системы
Накапливающие системы используют систему отражающих или пропускающих оптических решеток. Конструкция оптических ДЛП с отражающей решеткой показана на рис.2. Диафрагма сканирующей головки содержит 4 щели. Щели размещены так, что выходные сигналы фотоприемников сдвинуты на четверть периода измерительной решетки. Так сигналы, из-за смещения щелей сдвинуты по фазе и квазисинусоидальные сигналы фотоприемников. Разрешающая способность таких систем 0.5 мкм, что при общей погрешности не более 1 мкм для измерения перемещений в диапазоне 1-2 см.
Недостаток метода: требуется строгая параллельность линий рисок и линейки двигателя. Вторая система решеток использует метод муаровых полос.
Метод муаровых полос.
Муаровые полосы – система темных зон, образуемых при наложении и подсвечивании двух идентичных слегка смещенных под углом друг относительно друга решеток.
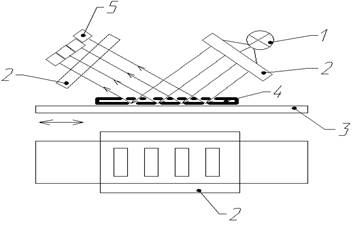
Рисунок 2 - ДЛП перемещений с отражающей решеткой.
1 – источник света, 2 – конденсорные линзы, 3 – стальная шкала с решеткой, 4 - диафрагма, 5 – фотоприемник.
При смещении решеток друг относительно друга зоны (темные и светлые) смещаются друг относительно друга вверх-вниз на расстояние l. Р – шаг решетки, θ – угол наклона.
Основные преимущества способа: (отражательной оптики)
1. муаровая картина не зависит от длины волны света в сравнительно широком диапазоне длин волн. Это позволяет применять в качестве источника света обычные миниатюрные лампы накаливания.
2. сохраняется высокий контраст муаровой картины при относительно больших (до десяти мм) зазорах между решетками.
3. шаг муаровой картины может соответствовать величине перемещений в несколько раз меньше, чем расстояние между штрихами решеток.
Муаровая картина формируется на выходе прозрачной решетки. Линейная ширина периода муаровой картины равна:
 , (1)
, (1)
где, d1 – постоянная прозрачной решетки, θ – угол разворота штрихов.
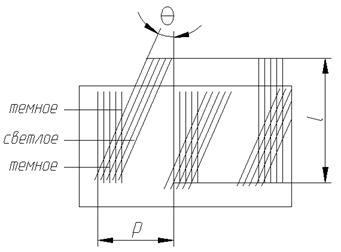
Рисунок 3 - Схема образования муаровых полос.
В ДЛП этот угол равен примерно 10-4 , так, что перемещению решетки на 1 мкм соответствует сдвиг муаровой картины на 10 мм, что легко фиксируется фотоприемником.
Обычно достаточно двух фотоприемников. При перемещении в них формируются сигналы:
I1 = k1 (E0 + Ecos2πX/ε)(2)
I2 = k2 (E0 ± Esin2πX/ε),(3)
--> ЧИТАТЬ ПОЛНОСТЬЮ <--