Реферат: Датчики УЗ сканеров
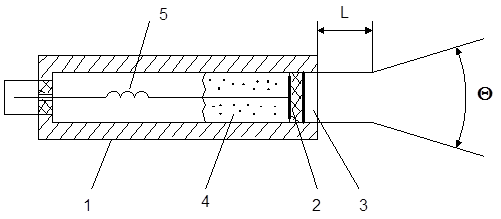
Датчиком УЗ сканера (по-английски Probe) называют выносное устройство, которое служит для локации объекта УЗ колебаниями и приема и преобразования в электрические импульсы отраженных звуковых сигналов (эхо). Датчик содержит один или несколько пьезоэлементов и другие механические и электрические компоненты, тип которых зависит от назначения датчика. Рассмотрим устройство простейшего датчика, содержащего один пьезоэлемент (рис. 1). Такой датчик называют еще монозондом.
 |
??????? 1. ?????????? ?????????????? ??????
В металлическом корпусе 1 расположен пьезоэлемент 2, который снаружи покрыт согласующим слоем 3. С тыльной стороны пьезоэлемента расположен демпфер 4 – слой пористой керамики, предназначенный для гашения звуковых колебаний, излучаемых назад, и для получения коротких УЗ импульсов. Возбуждение и съем сигнала с ПЭП осуществляется через коаксиальный разъем, причем наружный электрод ПЭП соединен с корпусом. Для уменьшения зарядного тока ПЭП и формирования зондирующего импульса в его цепь включают индуктивность 5 – дроссель.
Чтобы пьезопреобразователь работал на частоте собственного механического резонанса, его толщину выбирают равной половине длины волны возникающих в нем звуковых колебаний. Например, для ЦТС-19 при частоте 3 МГц найдем
![]() мм,
мм,
и значит толщина пьезоэлемента будет равна 0,67 мм.
Зондирование таким датчиком осуществляется путем непосредственного контакта с поверхностью тела. При этом неизбежны потери мощности УЗ колебаний из-за отражения. Для его уменьшения и служит согласующий слой. При его отсутствии вследствие большого различия волновых импедансов пьезоэлектрика и мягких тканей коэффициент отражения был бы равен 0,87, т.е. лишь 13% излучаемой энергии проходило бы в ткани. Для исключения отражений необходимо, чтобы волновой импеданс согласующего слоя Z![]() был равен среднегеометрической величине волновых импедансов ZП и ZТ пьезоэлектрика и тканей:
был равен среднегеометрической величине волновых импедансов ZП и ZТ пьезоэлектрика и тканей:
![]() . (1)
. (1)
Например, волновой импеданс ZС согласующего слоя для пьезоэлемента из ЦТС-19 будет равен примерно 3,7 Zводы (с учетом того, что ZТ ![]() Zводы ). Толщина согласующего слоя берется равной четверти длины волны в мягких тканях, в данном случае 0,25 мм.
Zводы ). Толщина согласующего слоя берется равной четверти длины волны в мягких тканях, в данном случае 0,25 мм.
Характеристика направленности датчика определяется размерами его рабочей поверхности – апертуры. Ее примерный вид для дискового ПЭП показан на рис. 1. Она имеет так называемую ближнюю зону (зону Френеля) длиной L и дальнюю зону (Фраунгофера), в которой УЗ луч расходится с углом ![]() . Эти параметры зависят от соотношения диаметра ПЭП и длины волны УЗ в тканях и определяются по формулам
. Эти параметры зависят от соотношения диаметра ПЭП и длины волны УЗ в тканях и определяются по формулам
![]() ;
; ![]() (2)
(2)
Например, для D =10 мм и ![]() = 0,5 мм имеем L = 50 мм и q»3о , т.е. протяженность ближней зоны достаточно велика, а угол расхождения – мал.
= 0,5 мм имеем L = 50 мм и q»3о , т.е. протяженность ближней зоны достаточно велика, а угол расхождения – мал.
Датчик с такой характеристикой направленности обеспечивает концентрированное излучение и селективный прием сигналов вдоль оси луча. Если же D = 1 мм, то L = 0,5 мм и q» 40о , т.е. ближняя зона практически отсутствует, а угол расхождения очень большой.
УЗ луч можно сфокусировать, если поверхность ПЭП выполнить вогнутой. Фокусное расстояние будет определяться радиусом кривизны. Для фокусировки применяют также акустические линзы. Они могут быть вогнутыми и выпуклыми. Если линза выпуклая, то она должна быть изготовлена из материала, скорость звука в котором меньше скорости звука в тканях. Применяют также электронно-управляемую фокусировку УЗ луча, которая будет рассмотрена ниже.
Различные способы отображения (визуализации) УЗ эхо-сигналов называются эхограммами. Простейшей из них является А-эхограмма. Она получается при локации объекта одномерным датчиком вдоль какого-либо направления и представляет собой некоторую кривую на экране ЭЛТ. Механизм получения А-эхограммы поясняет рис. 2. Датчик «обстреливает» объект короткими импульсами и электронного луча по экрану должна быть в два раза меньше скорости звука ![]() (при масштабе изображения 1: 1). Сделанное замечание относится к аналоговым УЗ приборам и не имеет существенного значения для цифровых.
(при масштабе изображения 1: 1). Сделанное замечание относится к аналоговым УЗ приборам и не имеет существенного значения для цифровых.
  принимает эхо-сигналы, отраженные от границ органов и сред. Эти сигналы отображаются на экране ЭЛТ с помощью временной развертки или в виде яркостных меток. При этом надо учитывать, что УЗ луч в объекте проходит путь в оба конца и затрачивает на это время t = 2Z/c, а электронный луч проходит путь в один конец, и затем следует невидимый обратный ход. Отсюда вытекает, что cкоростьдвижения принимает эхо-сигналы, отраженные от границ органов и сред. Эти сигналы отображаются на экране ЭЛТ с помощью временной развертки или в виде яркостных меток. При этом надо учитывать, что УЗ луч в объекте проходит путь в оба конца и затрачивает на это время t = 2Z/c, а электронный луч проходит путь в один конец, и затем следует невидимый обратный ход. Отсюда вытекает, что cкоростьдвижения |
Датчик Объект Эхо t Рисунок 2. А – эхограмма. |
А-эхограммы имеют ограниченное самостоятельное применение. Более распространена М-эхограмма, название которой происходит от английского словосочетания motion-time – движение-время. Этот вид эхограммы используют для исследования подвижных объектов, в основном сердца. Ее сущность поясняет рис. 3.
 Датчик
Датчик
Dмакс
Dмин
Сердце
Рисунок 3. М-эхограмма
Сердце через межреберное пространство зондируется одномерным датчиком по выбранному направлению УЗ посылками, следующими с частотой в несколько кГц. На экране ЭЛТ электронный луч разворачивается по осям Х и Y, причем по оси Xсо скоростью 25 – 50 мм/с, а по оси Y – cо скоростью c/2 (при масштабе 1:1), при этом координата Y соответствует глубине локации. За время одного сокращения сердца датчик «обстреливает» его большим числом импульсов и принимает большое число эхо-сигналов, которые вызовут появление яркостных меток на экране. Их координата Y соответствует глубине объекта, от которого был получен эхо-сигнал. На рис. 3 сердце показано в стадии диастолы (сплошная линия) и систолы (штриховая линия). В первом случае эхо от передней стенки миокарда приходит с меньшей, а во втором – с большей глубины. Таким образом, М-эхограмма представляет собой развертку во времени движения объекта по глубине.
Кроме стенок миокарда УЗ луч отражают и другие отделы сердца, и результирующая М-эхограмма получается очень сложной. Опытный врач-кардиолог может извлечь из нее много полезной информации: размеры сердца в разных стадиях (показано на рисунке), характер движения стенок и клапанов и многое другое. Описанный механизм получения М-эхограммы характерен для аналоговых УЗ сканеров. В цифровых сканерах он выглядит несколько иначе. Учитывая большую диагностическую информативность М-эхограммы, ее обязательно включают в набор режимов современных УЗ аппаратов.
Основным способом УЗ визуализации внутренних органов является двухмерная В-эхограмма. Она представляет собой изображение сечения внутреннего органа или структуры и, по сути, является томограммой. Ее получают с помощью сканирующих двухмерных датчиков, которые различаются по способу сканирования – с механическим и электронным управлением и по виду получаемого изображения (растра) – секторные и линейные. Датчики с механическим управлением дают только секторные изображения, а датчики с электронным управлением – могут давать изображения в секторном и прямоугольном растрах. Долгое время секторные механические датчики оставались основным типом датчиков УЗ сканеров. Они проще в изготовлении и имеют меньшую стоимость, чем линейные. Последние стали широко применяться, когда были разработаны способы управления, позволившие существенно улучшить качество изображения.
Механический секторный датчик обычно имеет один дисковый пьезоэлемент, который с помощью какого-либо движителя (обычно электродвигателя) совершает качание вокруг оси и зондирует объект УЗ импульсами с высокой частотой повторения (рис. 4).
--> ЧИТАТЬ ПОЛНОСТЬЮ <--