Реферат: Использование семафоров для синхронизации потоков
Одним из первых механизмов, предложенных для синхронизации поведения процессов, стали семафоры, концепцию которых описал Дейкстра (Dijkstra) в 1965 году. Он предложил использовать переменные, которые могут принимать целые неотрицательные значения. Такие переменные, используемые для синхронизации вычислительных процессов, получили название семафоров.
Семафор начинает действовать с назначенного для него начального отсчета. Всякий раз, когда поток получает права владения эти объектом (через функцию ожидания), счетчик в семафоре уменьшается на единицу. И всякий раз, когда поток уступает свои права владения объектом владения этим объектом, счетчик в семафоре увеличивается на единицу. Как только счетчик в семафоре достигнет нуля, семафор блокируется в несигнальном состоянии и ни один из потоков не может получить к нему доступ.
Для работы с семафорами вводятся два примитива, традиционно обозначаемых Р (от датского слова proberen — проверять) и V(от verhogen увеличивать). Пусть переменная S представляет собой семафор. Тогда классическое определение действия V(S) и P(S) операций выглядит следующим образом:
| P(S): |
ЕСЛИ S = 0 ТО процесс блокируется; ИНАЧЕ S = S – 1; |
| V(S): | S = S + 1; |
Эта запись означает следующее:
- при выполнении операции P над семафором S сначала проверяется его значение. Если оно больше 0, то из S вычитается 1.
Если оно меньше или равно 0, то процесс блокируется до тех пор, пока S не станет больше 0, после чего из S вычитается 1. Успешная проверка и уменьшение являются неделимой операцией.
- при выполнении операции V над семафором S к его значению просто прибавляется 1. Во время выполнения этой операции к переменной S нет доступа другим потокам.
Никакие прерывания во время выполнения примитивов Vи Р недопустимы.
Одной из типовых задач, требующих организации взаимодействия процессов с использованием семафоров, является задача producer-consumer (производитель-потребитель).
Например. Пусть буферный пул состоит из N буферов, каждый из которых может содержать одну запись.
Поток-производитель осуществляет запись в буфер, а поток-потребитель – чтение из буфера. В общем случае поток-производитель и поток-потребитель могут иметь различные скорости и обращаться к буферному пулу с переменой интенсивностью, В один период скорость записи может превышать скорость чтения, в другой - наоборот.
Для правильной совместной работы поток-производитель должен приостанавливаться, когда все буферы оказываются занятыми, и активизироваться при освобождении хотя бы одного буфера. Напротив, поток-потребитель должен приостанавливаться, когда все буферы пусты, и активизироваться при появлении хоти бы одной записи.
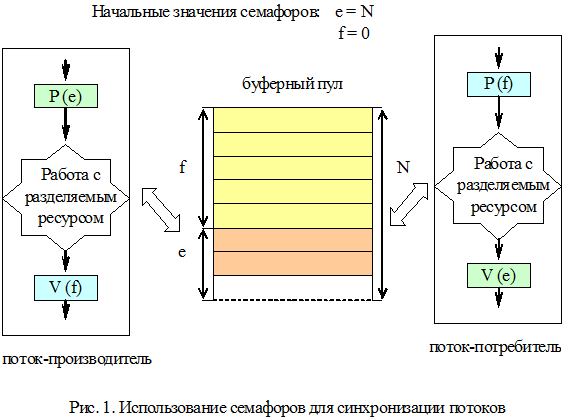
Введем два семафора: е — число пустых буферов, и f— число заполненных буферов, причем в исходном состоянии е = N, af = 0. Тогда работа потоков с общим буферным пулом может быть описана следующим образом (рис.1).
Поток-производитель прежде всего выполняет операцию Р(е), с помощью которой он проверяет, имеются ли в буферном пуле незаполненные буферы. В соответствии с семантикой операции Р, если семафор е равен 0 (т.е. свободных буферов в данный момент нет), то поток-производитель переходит в состояние ожидания.
Если же значением е является положительное число, то он уменьшает число свободных буферов, записывает данные в очередной свободный буфер и после этого наращивает число занятых буферов операцией V(f). Поток-потребитель действует аналогичным образом, с той разницей, что он начинает работ у с проверки наличия заполненных буферов, а после чтения данных наращивает количество свободных буферов.
Семафор может находиться в сигнальном или несигнальном состоянии. Приложение выполняет ожидание для семафора при помощи таких функций, как WaitForSingleObject()или WaitForMultipleObject().
Рассмотрим средства синхронизации Win32 АРI, основанные па использовании объектов исполнительной системы с дескрипторами. Для всех таких объектов организация ожидания сводится к вызыванию потоком управления функции ожидания, что принимает как параметр дескриптор объекта (или массив дескрипторов) и проверяет, не состоялась ли сигнализация этого объекта. Условие сигнализации зависит от объекта синхронизации.
В случае невыполнения условия сигнализации поток переходит в состояние ожидания, тратя очень мало ресурсов (процессорного времени и тому подобное), до тех пор, пока сигнализация все-таки не состоится или пока не минует максимальное время ожидания, если он был задан.
Когда сигнализация состоялась, поток немедленно выходит из состояния ожидания (из функции ожидания) и продолжает свое выполнение. Функция ожидания в этом случае перед выходом может изменить состояние объекта (например, занять блокировку).
Для ожидания сигнализации одного объекта у Win32 используют функцию WaitForSingleQbject(), синтаксискоторойследующий:
DWORD WaitForSingleObject(HANDLE handle, DWORD timeout);
Параметры:
handle – определяет дескриптор синхронизированного объекта;
timeout – задает максимальное время ожидания в милисекундах (значение INFINITE свидетельствует о бесконечном ожидании).
Возвращаемое значение: Функция WaitForSingleObject() возвращает такие значения: WAIT_OBJECT_0 - состоялась сигнализация объекта; WAIT_TIMEOUT - минуло время ожидания (если timeout не равнялся INFINITE), а объект своего состояния так и не изменил.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--