Реферат: Характеристики сучасних моноімпульсних вторинних оглядових радіолокаторів
1. Типові тактико-технічні характеристики сучасних моноімпульсних вторинних оглядових радіолокаторів
Обладнання моноімпульсних вторинних оглядових радіолокаторів має задовольняти вимоги, викладені у томі IV «Системи оглядової радіолокації і попередження зіткнень» Додатка 10 до Конвенції про міжнародну цивільну авіацію, а також у стандарті Євроконтролю з радіолокаційного спостереження повітряного простору SUR.ET.1.STO1.1000-STD-01-01. Всі сучасні моноімпульсні вторинні оглядові радіолокатори, назви яких наведені у вступі до цього навчального посібника, задовольняють вимоги, що містяться у зазначених документах із певним перевищенням окремих показників.
Згідно із зазначеними вище вимогами несуча частота сигналів запиту має бути fзап = (1030±0,1) МГц із прямовисною поляризацiєю випромінюваних радіохвиль. Для вторинних радіолокаторів, що працюють у селективних режимах, встановлені більш жорсткіші вимоги до стабільності несучої частоти fзап = 1030±0,01 МГц, оскільки в цьому випадку у запитах бортових відповідачів використовуються сигнали з відносною фазовою модуляцією. Сигнали відповіді мають передаватися на несучій частоті fВІДП = 1090±3 МГц також з прямовисною поляризацією. У селективному режимі стабільність несучої частоти має бути підвищена до ±0,1 МГц, щоб під час приймання сигналів моноімпульсним методом не виникали додаткові похибки внаслідок фазової й амплітудної неузгодженості сумарного і різницевого каналів з нестабільною несучою частотою відповідачів.
Проміжна частота у всіх моноімпульсних ВРЛ дорівнює fпр = 60 МГц. Такий вибір проміжної частоти обумовлений необхідністю раціональної побудови апаратури запитувачів приймача-передавача.
Оскільки в цьому випадку
моноімпульсний оглядовий радіолокатор антена
fпр = fВІДП – fзап = (1090 –1030) МГц,
то збуджувач передавача, який працює на частоті 1030 МГц, може одночасно виконувати і функції гетеродина приймача, що не тільки покращує економічні показники запитувача, але і підвищує стабільність його проміжної частоти.
Найбільша частота повторення сигналів запиту Fпз має становити 500 Гц. Для запобігання зайвих запусків відповідачів необхідно встановлювати мінімально можливу частоту повторення запитів, припустиму з погляду одержання прийнятних характеристик усієї системи з урахуванням швидкості обертання антени й ширини її ДН. Для селективних систем вторинної радіолокації, з огляду на ту обставину, що у прийманні сигналів відповіді у них використовується моноімпульсний режим роботи, гранична частота запитів істотно знижена. Частота повторення запитів загального виклику в режимах RBS і S й УВД і S має складати не більше 250 Гц. Теж саме стосується і запиту загального виклику режиму S. У всіх режимах запиту має використовуватися найменша можлива частота повторення сигналів запиту. Запити режиму S, що скеровані одному адресату і потребують відповіді, повинні випромінюватися з інтервалом не менше 400 мкс.
У більшості сучасних моноімпульсних ВРЛ, які працюють у режимах RBS, передбачена можливість установки частоти запиту в межах 100…450 Гц із внутрішньою або зовнішньою синхронізацiєю. Для зменшення рівня взаємних завад передбачена вобуляція періоду повторення запитів у межах до 12,5%. Вобуляція періоду повторення дозволяє перевести синхронні взаємні завади до розряду несинхронних, що значно полегшує процес їхнього придушення.
У всіх моноімпульсних ВРЛ передбачене автоматичне перемикання режимів запитів. Можлива установка режимів 1, 2, 3/А, С, 3К1, 3К2, 3К3, суміщеного режиму RBS і УBД, режимів 4 і S. Режими 1 і 2 із кодовими інтервалами між імпульсами запиту 3 і 5 мкс мають військове призначення і використовуються для розпізнавання ПС у несекретних системах “свій – чужий” (IFF – Identification Friend or Foe). Для цивільних цілей ці режими не використовуються. Військовий режим 3 має точно таке саме призначення, як і режим А в системі RBS, тобто використовуються для індивідуального розпізнавання військових і цивільних ПС. Режим 4 є секретним військовим режимом закордонних країн і використовується тільки у ВРЛ подвійного призначення. Режим С призначений для запиту барометричної висоти в системах RBS. Режими 3К1, 3К2, 3К3 і суміщені режими RBS і УВД мають обмежене застосування і використовуються тільки в країнах колишнього СНД. Багато сучасних моноімпульсних ВРЛ можуть працювати в селективних режимах S або за своїми технічними характеристиками пристосовані до оперативного переходу до режиму S.
Передбачене чергування режимів, яке може бути одиничним (х, х, х,...), подвійним (х, у; х, у; х, у;...) або потрійним (х, х, у; х, х, у;...); (х, у, z; х, у, z і т.д.), де х, у, z – заздалегідь обрані режими. Можливе автоматичне перемикання чергування режимів від сканування до сканування, тобто від одного оберту антени до іншого. Період огляду простору в сучасних моноімпульсних ВРЛ може змінюватися в широких межах. В улаштованих ВРЛ період огляду простору визначається первинним радіолокатором. Для автономних вторинних радіолокаторів типовими значеннями періоду огляду є 4…10 с. Неузгодження електричних осей первинних і вторинних антен в єдиному радіолокаційному комплексі припускається до 6 кутових мінут, а під час роботи ВРЛ в автономному режимі – до 0,5°. Ширина ДН антени запитувача у поземній площині згідно з встановленими нормами не повинна перевищувати 5°. У сучасних моноімпульсних ВРЛ ширина ДН сумарної антени зазвичай обирається у межах 2,35…2,4°. Рівень бокових пелюсток ДН у порівнянні з головною пелюсткою антени зазвичай не перевищує –28 дБ (за нормою –24 дБ).
Розділова здатність і точність моноімпульсних вторинних оглядових радіолокаторів набагато перевищує встановлені норми. Згідно з нормами розділова здатність за дальністю δr не повинна бути більше 1 км, а за азимутом (δφ) – більше 1,2 ширини ДН антени на рівні 0,7 за напруженістю електромагнітного поля. У сучасних моноімпульсних ВРЛ відповідні експериментальні дані лежать у межах δr = 45...110 м, δφ = 0,45...0,66°.
Оскільки розділова здатність, так само, як і точність, це статистичний параметр і до того ж обумовлений багатьма чинниками, як наприклад, взаємним розташуванням цілей за дальністю й азимутом, відстанню ПС до радіолокатора, частотою запитів, програмою чергування кодів запиту, наявністю завад, відношенням сигнал/шум тощо. Більш об’єктивну характеристику розділової здатності радіолокаторів дають дані, отримані на випробуваннях моноімпульсних радіолокаторів типу IRS-20MP/L.
Розрізняють розділову здатність вторинних радіолокаційних систем у задачах визначення координат ПС і в задачах отримання додаткової інформації, переданої за допомогою кодових сигналів відповіді.
Для координатної розділової здатності знайдено, що за умови потрапляння двох цілей, оснащених відповідачами, у просторове вікно з розмірами 0…93 м за відстанню і 0…0,6° за азимутом, імовірність окремого визначення координат цілей буде не гірше 60%. Якщо розміри вікна складають за відстанню 93 м…3,7 км, а за азимутом залишаються у тих самих межах, тобто від 0 до 0,6°, то ймовірність окремого визначення координат цілей буде не гірше 98%. Якщо вікно за відстанню не перевищує 3,7 км, а вікно за азимутом має розміри 0,6…4,8°, то ймовірність окремого визначення положення двох цілей, що знаходяться в цьому вікні, буде також не гірше 98%.
Для інформаційної розділової здатності знайдено, що за умови потрапляння двох цілей у просторове вікно з розмірами 0…93 м за відстанню і 0…0,6° за азимутом, ймовірність достовірного дешифрування сигналів додаткової інформації під час роботи запитувачів і відповідачів у режимах 3/А й С буде не менше 30%. Той самий показник для вікна 93 м…3,7 км за відстанню і 0…0,6° за азимутом складає не менше 90%, а для вікна 0…3,7 км за відстанню і 0,6…4,8° за азимутом – не менше 98%.
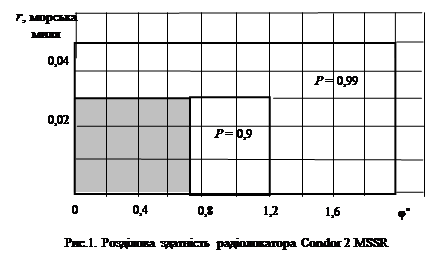
Аналогічні залежності для радіолокатора Condor 2 MSSR наведені на рис.1. Дані отримані для випадку розташування у просторовому вікні двох цілей, ймовірність відповіді яких на запит дорівнює 0,9, швидкість обертання антени запитувача дорівнює 15 об/хв, частота запитів – 150 Гц, а ймовірність правильного декодування інформації відповіді у нормі.
Точність визначення координат моноімпульсним ВРЛ визначається як різниця між вимірюваним положенням оцінки цілі і справжнім її розташуванням у момент виявлення цілі. Точність визначається як систематичною складовою випадкової похибки вимірювання, так і грубими помилками (Jumps).
 |
Згідно зі стандартом Євроконтролю систематичні похибки для моноімпульсних ВРЛ не повинні перевищувати 100 м за похилою відстанню, 0,1° за азимутом, а приріст похибки за відстанню залежно від відстані до цілі не повинний перевищувати одного метра на одну морську милю. Реальні дані, отримані під час точнісних випробувань значної кількості моноімпульсних радіолокаторів різних типів, у більшості випадків на багато краще зазначених вище норм. Систематичні похибки за відстанню лежать у межах 15...30 м, за азимутом – у межах 0,02...0,05°, а приріст похибки залежно від відстані до цілі – менше одного метра на одну морську милю.
Для випадкових середніх квадратичних похибок установлені норми : за відстанню 70 м, за азимутом 0,08°. Після випробувань отримані такі дані: похибки за відстанню лежать у межах 15...30 м, за азимутом – 0,0..0,05°. Нормами встановлено, що похибки фіксації моменту часу, коли відбулося виявлення цілі, не повинні перевищувати 100 мс. Експериментальні дані підтвердили цей час.
Одним із показників, що характеризує точність ВРЛ, є грубі помилки у визначенні координат цілей. До них належать такі випадкові помилки, коли похибка у визначенні дальності перевищує 700 м, а азимуту – 1°. Згідно з нормами Євроконтролю такі помилки повинні зустрічатися не частіше 0,05% від усіх випадків локалізації цілей. Експериментальні дані підтвердили наведені значення похибок.
Важливим параметром, що характеризує якість роботи ВРЛ, є відносна кількість неправильного дешифрування кодових сигналів прийнятої додаткової інформації. Згідно з нормами воно не повинно перевищувати 0,2% і при цьому повинно рівномірно розподілятися між кодами 3/А й С, тобто 0,1% для режимів 3/А й 0,1% для режиму С. Експериментальні дані свідчать про виконання цих норм усіма сучасними вторинними моноімпульсними радіолокаторами.
Стандартом колишнього Радянського Союзу і країн СНД встановлені деякі норми, що характеризують надійність ВРЛ. Для запитувачів середній час наробітку на відмову має бути більше 4000 год. Технічний ресурс радіолокатора має бути більше 100 тис. год або термін служби – 12 років. Середній час наробітку бортового обладнання на відмову в польоті і на землі має бути не менше 5000 год технічний ресурс – не менше 10 тис. год до першого капітального ремонту.
Сучасні моноімпульсні ВРЛ мають більш високі показники надійності, ніж це передбачено нормами. Так, наприклад, у радіолокатора SIR-S середній наробіток на відмову за умови двоканальної роботи складає 33 260 год (за одноканальної роботи – 3170 год), у радіолокатора Condor2 – 141 420 год за умови двоканальної роботи (за одноканальної – 27 630 год), у радіолокатора MSSR/Mode S Northrop Gramman – 10 тис. год за одноканальної роботи.
2. Параметри, що визначають зону виявлення моноімпульсних вторинних оглядових радіолокаторів
На відміну від первинних радіолокаторів у вторинній радіолокації дальність дії визначається системою рівнянь:
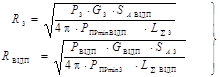 ,(1)
,(1)
де R3 – дальність дії вторинної радіолокаційної системи за запитом; RВІДП – дальність дії вторинної радіолокаційної системи за відповіддю; P3 – імпульсна потужність запитувача; РВІДП – імпульсна потужність відповідача; G3 – коефіцієнт підсилення антени запитувача; GВІДП – коефіцієнт підсилення антени відповідача; PПРmin3 – чутливість приймача запитувача; PПРminВІДП – чутливість приймача відповідача; SАВІДП – ефективна площа антени відповідача; SА3 – ефективна площа антени запитувача; L∑ 3 – сумарні втрати потужності за запитом; L∑ ВІДП – сумарні втрати потужності за відповіддю.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--