Реферат: Контроллеры для автоматизации крупных промышленных объектов
5. гарантированное время доставки сообщений;
6. соответствие какому либо из распространенных стандартов.
Внутренняя шина MIF-контроллера выбиралась из так называемых "полевых" шин (сетей). При выборе анализировались следующие стандартные сети из числа наиболее распространенных "полевых" сетей: Profibus, CAN-bus и другие.
CAN-bus проектировался для обеспечения взаимодействия тесно связанных по управлению контроллеров. CAN-bus идеально подходит для задач управления агрегатного уровня, хотя и имеет ряд ограничений: по скорости передачи (до 1Мбод), что может оказаться недостаточным для цехового уровня; по топологии сети, по протяженности (до 40 м при максимальной скорости передачи), по передаче крупных массивов информации [6].
Profibus сегодня - стандарт номер один в автоматизации цехового уровня: имеет высокие скорости до 12Мбод; разнообразные варианты топологий, допускающей комбинации различных технологий, как на медном кабеле, так и на оптоволоконном; большую протяженность сегментов. Для задач управления на уровне агрегата, механизма и т.п. он является несколько громоздким и избыточным. Он прекрасно подходит в качестве сети более высокого "цехового" уровня для объединения контроллеров.
В качестве внутренней шины контроллера была выбрана шина CAN-bus. С нашей точки зрения для внутренних коммуникаций контроллера она подходит наилучшим образом [5].
Сеть CAN-bus является одним из наиболее зрелых стандартов. Он реализован в виде специализированных СБИС более чем 20 ведущими компаниями, поддерживает разнообразные среды передачи, контролирует целостность и отсутствие ошибок при передаче/приеме сообщения без получения специального ответа от "получателя". Жесткая детерминированность протокола, динамическое распределение приоритетов, многомастерность, поддержка совместной обработки управляемой событиями, смысловая адресация сообщений и событий вместо традиционной физической адресации получателя/отправителя сетевых пакетов, все это делает его подходящим средством межмодульной коммуникации в контроллере [5].
Итак, взаимодействие MIF-модулей внутри MIF-контроллера осуществляется по дублированной шине CAN-bus. Конструктивно сеть CAN-bus выполнена в MIF-контроллере на объединительной печатной плате, в которую устанавливаются MIF-модули. Дублирование шины повышает надежность MIF-контроллера до уровня, который никогда не достижим в традиционных контроллерах - MIF-контроллер не может отказать ни при каком любом единичном отказе среды передачи контроллера.
Решения по организации ввода/вывода
Контроллеры в ПТК для автоматизации технологических процессов должны решать вполне определенный набор задач по вводу, т.е. преобразованию физических сигналов в цифровой код, и выводу, т.е. обратному преобразованию из цифрового кода в физический сигнал. В этот набор входят задачи ввода сигналов от термопар, термометров сопротивлений, потенциальных и токовых аналоговых сигналов и дискретных сигналов в диапазоне от 24В до 220В, а так же задачи вывода потенциальных и токовых аналоговых команд и дискретных команд в том же диапазоне. Кроме того, в ряде случаев могут возникать более нестандартные задачи ввода/вывода. Для решения этих разнообразных задач требуется набор соответствующих модулей для ввода/вывода.
При разработке MIF-контроллера, как одна из основных, ставилась задача минимизации расходов на разработку, минимизации стоимости контроллера, унификации принятых технических решений и проектной компонуемости не только контроллера, но и входящих в него модулей.
Для удовлетворения всех перечисленных требований была выбрана "мезонинная" технология организации ввода/вывода, которая основана на выделении целевых функций ввода/вывода в отдельные субмодули (мезонины), устанавливаемые на модуль-носитель.
Нами была выбрана "мезонинная" технология ModPack, разработанная в 80-х годах компанией PEP Modular Computers [7]. Эта технология получила широкое распространение в мире и является сегодня открытым международным стандартом. Сегодня в мире выпускается различными независимыми производителями около ста типов субмодулей в стандарте ModPack. Это означает, что на рынке средств автоматизации можно найти функциональный субмодуль для решения практически любой задачи.
Отличительной особенностью субмодулей ModPack от других мезонинных технологий является крайне простой системный интерфейс. В отличие от многих других мезонинных модулей, он разрабатывался специально для задач сопряжения с объектом автоматизации. В нем детально продуманы вопросы электросовместимости и электробезопасности. Использование "мезонинной" технологии сузило нашу задачу до разработки одного единственного модуля-носителя для субмодулей ModPack, удовлетворяющего всем общесистемным требованиям, упомянутым в этой статье.
Сопряжение с "полевым" уровнем
Основная часть функций сопряжения ПТК с "полевым" уровнем (датчики, преобразователи, исполнительные механизмы и пр.) решена в субмодулях ModPack. В них реализуются функции аналого-цифрового преобразования, фильтрации, цифро-аналогового преобразования и т.п.
Остальная часть задач сопряжения, таких как подключение "полевых" кабельных связей сечением до 2,5 мм2, согласование с конкретными измерительными схемами (2, 3, 4-х проводные, переход из термокомпенсационного кабеля в медный, и т.д.), дополнительные преобразования (24В в 220В и наоборот) и т.п., решается в Блоках Полевых Интерфейсов (БПИ).
БПИ могут устанавливаться в шкафу как отдельно, так и вместе с крейтом контроллера. БПИ монтируются на стандартную DIN-рейку. В верхней части БПИ размещаются клеммы для подключения "полевых" кабелей, а в нижней - разъем для подключения плоского 24 жильного кабеля к MIF-модулям с установленными на них субмодулями ModPack.
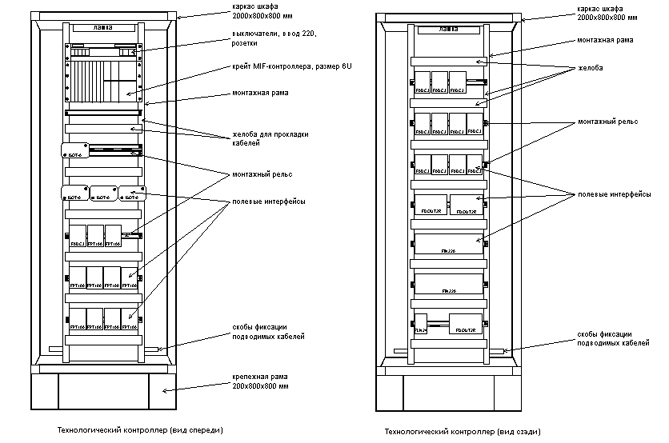
Рис. 2. Типовой пример компоновки шкафа КФУ
Большим достоинством применения БПИ является отсутствие дополнительных шкафов пром-клеммников для подключения "полевых" кабелей, простота монтажа оборудования внутри шкафа, высокая модульность и легкость модификаций.
Выбор элементной базы MIF-модуля
При выборе элементной базы для MIF-модуля мы руководствовались следующим:
1. микропроцессор должен поддерживать широко распространенные операционные системы реального времени;
2. иметь встроенные средства для предотвращения зацикливания программ (watch-dog), развитая системная диагностика;
3. развитые средства отладки и тестирования;
4. поддержка инструментальных средств разработки;
5. наличие интерфейса Ethernet;
6. достаточно высокая производительность - не менее нескольких MIPs;
7. оптимальное соотношение стоимость/функциональность.