Реферат: Микропроцессорные системы автоблокировки
Эта система разработана для повышения устойчивости функционирования рельсовой цепи в условиях изменяющегося в широких пределах сопротивления изоляции, повышения надежности аппаратуры, помехозащищенности системы контроля состояний рельсовой линии, снижения энерго- и материалоемкости, а также эксплуатационных затрат на содержание устройств.
Система АБ-ЧКЕ функционально и электромагнитно совместима с релейной автоблокировкой. В отличие от эксплуатируемой системы микропроцессорный дешифратор АБ-ЧКЕ различает кодовые комбинации желтого и зеленого огней и имеет сигнальные реле Ж, ЖЗ и 3. Это позволяет реализовать четырехзначную сигнализацию без дополнительных пар кабеля и аппаратуры.
Конструктивно аппаратная часть автоблокировки АБ-ЧКЕ (микропроцессорный путевой приемник МПП-ЧКЕ) выполнена в виде одного металлического блока размерами 230x330x270 мм и массой, не превышающей 5 кг. На раме блока размещаются съемные узлы, которые в процессе эксплуатации легко можно заменить. Масса типового элемента замены (ТЭЗ) не превышает 400 г. В состав ТЭЗ МПП-ЧКЕ входят источник питания, ячейка запуска, схема контроля и два узла центрального процессора.
Конструкция аппаратуры АБ-ЧКЕ позволяет проводить модернизацию устройств, заменяя аппаратуру методом "шкаф на шкаф". МПП-ЧКЕ может быть установлен в релейных шкафах любого типа или размещен на стативах станционных систем централизации. После замены релейной системы на АБ-ЧКЕ заново выполнять регулировку рельсовой цепи не требуется.
Блок микропроцессорного путевого приемника включает в себя следующие функциональные узлы числовой кодовой автоблокировки: БИ-ДА, БС-ДА, БК-ДА, КПТ-5 (КПТ-7); трансмиттерное реле ТШ-65В и импульсное путевое реле ИМВШ-110 или ИВГ. Путевой приемник МПП-ЧКЕ выполнен на современной элементной базе - микросхемах средней степени интеграции серии 1533 и микропроцессорном комплекте 1821. Аппаратура АБ-ЧКЕ рассчитана на работу при колебаниях температуры окружающей среды от минус 45 до плюс 65 °С и относительной влажности воздуха до 95%. Расчетное среднее время наработки на отказ 40 000 ч. Микропроцессорный путевой приемник является универсальным. Он рассчитан для эксплуатации на участках с электротягой постоянного и переменного тока, а также автономными видами тяги; МПП-ЧКЕ имеет два режима работы: трансляции и приемопередачи сигналов. Как транслятор МПП-ЧКЕ можно использовать в устройствах автоматической переездной сигнализации и электрической централизации для кодирования станционных рельсовых цепей. Режим и настройка МПП-ЧКЕ на кодовые комбинации, формируемые трансмиттерами КПТ-5 и КПТ-7, выбираются коммутацией настроечных перемычек.
В МПП-ЧКЕ процедуры контроля состояния рельсовой линии, демодуляции, декодирования и формирования сигналов выполнены на программном уровне. Полезный сигнал обнаруживается методом поиска разладки случайного процесса. При разработке алгоритма обнаружения учитывались результаты экспериментальных исследований статистических характеристик дестабилизирующих факторов, позволяющие компенсировать их мешающее воздействие на функционирование системы КРЛ. Под разладкой понимается скачкообразное изменение свойств случайного процесса.
Различают положительную и отрицательную разладки. Применительно к контролю состояний рельсовых линий под положительной разладкой понимают скачкообразное изменение амплитуды сигнала контроля в момент освобождения рельсовой линии подвижным составом. Отрицательная разладка заключается в скачкообразном снижении амплитуды сигнала контроля, происходящей под действием поездного шунта или при нарушении целостности рельсовых нитей.
Из рекуррентных методов обнаружения разладки широкое распространение нашел алгоритм кумулятивных сумм с отражающим экраном. Он представляет собой модифицированный последовательный анализ Вальда. Правило обнаружения разладки строится на сравнении на h-м шаге решающей статистики Shc фиксированным порогом Uпв.
Статистика
 (4.1)
(4.1)
где W1 (Yh\ Q 2), Wo (Yh\ Q1) - условные плотности распределения вероятностей наличия сигнала с параметрами Q2 и Q1 в выборке {Yh}; Q1 - амплитуда сигнала на входе приемника в шунтовом, а Q2 - в нормальном режиме; {'}+ = max {О,Sh}.
Порог Uпв устанавливается исходя из требуемой вероятности правильного фиксирования свободного состояния рельсовой линии. Таким образом, если на h-м шаге выполняется условие Sh![]() Uпв, принимается решение о свободном и исправном состоянии рельсовой линии. Если Sh < Uпв, то справедливой считается гипотеза о занятом или неисправном состоянии линии, и выполняется следующее (h + 1) - е наблюдение. Если кумулятивная сумма на произвольном шаге отрицательна, то на следующем шаге ее значение обнуляется, что в формуле (4.1) обозначено (+).
Uпв, принимается решение о свободном и исправном состоянии рельсовой линии. Если Sh < Uпв, то справедливой считается гипотеза о занятом или неисправном состоянии линии, и выполняется следующее (h + 1) - е наблюдение. Если кумулятивная сумма на произвольном шаге отрицательна, то на следующем шаге ее значение обнуляется, что в формуле (4.1) обозначено (+).
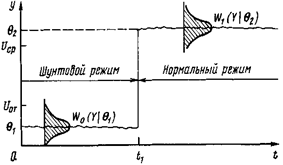
Рис. Диаграмма напряжений на входе путевого приемника.
![]()

Рис. Диаграмма решающей статистики.
Поясним работу приемника, реализующего алгоритм (4.1), на примере, когда подвижной состав освобождает рельсовую линию и происходит переход из шунтового режима в нормальный (рис.4.24).
В шунтовом режиме на входе решающего устройства приемника присутствует смесь Y![]() слабого полезного сигнала с амплитудой 6 и помех n(t
слабого полезного сигнала с амплитудой 6 и помех n(t![]() ): yh = Q1 + n(t
): yh = Q1 + n(t![]() ).
).
В этом случае значения функции Wo (Yh| Q1) превышают W1 (Yh| Q2), а логарифм отношения правдоподобия ln = ![]() вследствие случайного характера помех n(t
вследствие случайного характера помех n(t![]() ) с одинаковой вероятностью принимает положительные и отрицательные значения. Согласно алгоритму (4.1) отрицательные значения кумулятивной суммы принудительно обнуляются. Таким образом, в шунтовом режиме решающая статистика флуктуирует около нулевого значения (рис.4.25).
) с одинаковой вероятностью принимает положительные и отрицательные значения. Согласно алгоритму (4.1) отрицательные значения кумулятивной суммы принудительно обнуляются. Таким образом, в шунтовом режиме решающая статистика флуктуирует около нулевого значения (рис.4.25).
В нормальном режиме на входе приемника действует смесь полезного сигнала высокого уровня Q2 и помехи. Значения функции W1 (Yh| Q2) в произвольный h-й момент превышают величину w0 (Y![]() | Q1). и логарифм их отношения всегда положителен. В этом случае кумулятивная сумма (4.1) с ростом номера шага h непрерывно возрастает. После повышения решающей статистики sh порога разладки U
| Q1). и логарифм их отношения всегда положителен. В этом случае кумулятивная сумма (4.1) с ростом номера шага h непрерывно возрастает. После повышения решающей статистики sh порога разладки U![]() приемник фиксирует свободное состояние рельсовой линии. Аналогичным образом приемник работает при переходе из нормального режима в шунтовой или контрольный.
приемник фиксирует свободное состояние рельсовой линии. Аналогичным образом приемник работает при переходе из нормального режима в шунтовой или контрольный.
Решение об изменении режима выносится не сразу после скачка входного напряжения в момент времени t![]() (см. рис.4.24 и 4.25), а по истечении некоторого времени Тр = (hр - h1) Δ
(см. рис.4.24 и 4.25), а по истечении некоторого времени Тр = (hр - h1) Δ![]() , в течение которого на каждом шаге проверяется факт наличия полезного сигнала [Δт - интервал квантования входной реализации; (hр - h1) - количество отсчетов на обнаружение разладки случайного процесса]. Значение величины (h
, в течение которого на каждом шаге проверяется факт наличия полезного сигнала [Δт - интервал квантования входной реализации; (hр - h1) - количество отсчетов на обнаружение разладки случайного процесса]. Значение величины (h![]() - h1) равно 4-5.
- h1) равно 4-5.
В течение временного интервала Тр на каждом отсчете hiє [h1, hp] приемник анализирует процесс накопления кумулятивной суммы. Если такой процесс происходит, то после превышения решающей статистики sh порога Unв принимается решение об изменении режима работы рельсовой цепи. Процесс накопления кумулятивной суммы sh аналогичен сглаживанию реализации сигнала Y(th). Благодаря этому свойству исключаются ситуации ложного срабатывания приемника под действием случайных импульсных помех или при кратковременной (до 3 - 10 с) потере поездного шунта.
Для повышения устойчивости работы автоблокировки при изменении в широких пределах сопротивления балласта приемник МПП-ЧКЕ дополнен адаптивным алгоритмом обработки сигналов, обеспечивающим автоматическую регулировку порога обнаружения и коэффициента возврата. Приемник МПП-ЧКЕ имеет следующие рабочие характеристики: вероятность ложного срабатывания при пороге обнаружения разладки равна восьми и при соотношении "сигнал/помеха", равном трем, не превышает 10![]() .
.
Вход приемника соединен с рельсовой линией через дроссель-трансформатор ДТ-0,2 (ДТ1-150) и устройство защиты и согласования УЗС. В качестве УЗС используется защитный блок-фильтр ЗБФ-1 при электрической тяге постоянного тока или полосовой фильтр ФП-25 (ФП-75) на участках с тягой переменного тока. Для защиты МПП-ЧКЕ от грозовых перенапряжений на его входе (до фильтров) включен электронный блок защиты БЗЭ-1 с порогом ограничения напряжения 70 В.
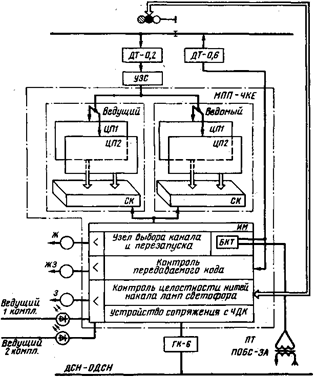
Структурно микропроцессорный путевой приемник системы автоблокировки АБ-ЧКЕ выполнен по схеме "два по два" (рис.4.26). Он состоит из двух двухкомплектных каналов и интерфейсного модуля ИМ. Каждый канал содержит два узла ЦП1 и ЦП2 центрального процессора и схему контроля СК. В интерфейсный модуль входят: узел выбора канала и перезапуска; бесконтактный коммутатор тока БКТ; схемы контроля передаваемой кодовой комбинации и контроля целостности нитей накала светофорных ламп, а также схема сопряжения с аппаратурой системы частотного диспетчерского контроля.
Нормально оба канала МПП-ЧКЕ находятся в рабочем состоянии. Один из них является ведущим (на рис.4.26 слева), а другой - ведомым. Ведущий канал через узел выбора и перезапуска ИМ подключен к рельсовой линии, сигнальному реле, бесконтактному коммутатору тока и камертонному генератору ГК-6 системы частотного диспетчерского контроля. При исправных аппаратных средствах этот канал выполняет технологический алгоритм обработки информации сигнальной точки автоблокировки.
После демодуляции и декодирования принятого сигнала возбуждаются соответствующие сигнальные реле (Ж, ЖЗ или 3). Для повышения помехозащищенности при дешифрировании кодовых комбинаций Ж или 3 реле ЖЗ или 3 срабатывает при условии одинакового приема не менее трех кодовых циклов. Выключение сигнальных реле при скачкообразном уменьшении полезного сигнала под действием поездного шунта осуществляется сразу, а при смене кодирования - в конце последней принятой кодовой комбинации. Таким образом, инерционность системы АБ-ЧКЕ, определяемая как интервал времени между моментами изменения сигнала в рельсовой линии и смены показания проходного светофора, не превышает 3-4 с.
В МПП-ЧКЕ реализован метод приема сигналов в целом. Суть его состоит в следующем. В ПЗУ декодера хранятся эталонные кодовые комбинации, используемые в системе автоблокировки. В процессе декодирования принимаемый сигнал сравнивается с контрольным. Для идентификации кодовой комбинации временные различия длительностей импульсов, интервалов и цикла между эталонным и принятым сигналами не должны превышать 0,05 с. Если кодовые комбинации не совпадают или разница длительностей посылок превышает 0,05 с, осуществляется отбраковка сигнала. В противном случае происходит выполнение команды - возбуждение соответствующих сигнальных реле.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--