Реферат: Надежность технических средств
![]()
где

Предположим, что для каждого конфигурационного состояния системы, т.е. для каждого интересующего нас параметра технических возможностей, его величина, определяемая в числовом виде, имеет особое значение. Тогда анализ жизнеспособности ВС будет состоять из следующих шагов:
1) разработка модели конфигурационного состояния ВС;
2) определение на основе элементов СВМО и СВВ коэффициента готовности для каждого конфигурационного состояния.
4. Функция ограничения возможностей системы
Предположим, что нас интересуют k параметров, определяющих технические возможности ВС. С каждым конфигурационным состоянием Sx связана определенная величина каждого из рассматриваемых параметров Аkх , с которым в свою очередь связана функция ограничения (Fогр ), определяющая относительную важность соответствующего параметра. Эта функция
Fогр = f {Sх ; Akx , τx },
где τх - длительность нахождения системы в данном состоянии. Задержка выполнения функции обработки может оказаться не столь важной, пока не достигнет пороговой величины. Повышение (относительно расчетных) технических возможностей никак не учитывается, тогда как уменьшение их ниже допустимого предела резко ограничивает возможности ВС. Например, для нормального функционирования операционной системы UNIX на ЭВМ класса СМ-4 требуется объем оперативной памяти – 1 Мбайт, в случае уменьшения ее до 256 Кбайт возможности данной ОС резко падают и она практически теряет все преимущества перед другими ОС, значительно более слабыми (RSX - 11 М).
На рис. 1 приведен вид некоторых типичных функций ограничения, где по оси X откладывается значение параметра (в нормализованном от некоторого заданного уровня виде), а по оси Y – значение параметра, определенное функцией ограничения.
На рис. 1, а приведена функция ограничения параметра, для которого превышение технических возможностей игнорируется по каждому их уровню вплоть до максимума, которому присваивается полный вес. Например, дисковая память емкостью ?9 Мбайт не дает никаких практических преимуществ, если для создания базы данных системы со всеми словарями необходимо 10 Мбайт.
На рис. 1, б приведена функция ограничения для нежелательного параметра. Номинальному значению соответствует полное отсутствие данного фактора. Примером такого параметра является время реакции в системе, которое в идеальном случае должно выражаться несколькими миллисекундами. В случае его увеличения до величины, вызывающей у пользователя нежелание работать с предлагаемой ему системой, дальнейшее снижение значения функций ограничения приостанавливается.
На рис. 1, в приведена функция ограничения параметра, который получает положительную оценку лишь по достижении определенной минимальной величины (например, система сервоуправления, где для обеспечения стабильности каждую секунду необходимо выполнять минимальное число итераций).
На рис. 1, г приведен параметр с функцией ограничения типа "окно". Примером может служить устройство построчной печати, при уменьшении скорости печати которого до некоторой минимальной величины его полезность равна нулю, поскольку для этой скорости печати существуют знакосинтезирующие устройства, значительно более дешевые. Если же устройство печатает с очень большой скоростью все время, то это также не имеет смысла, поскольку гору бумаги, которую в состоянии напечатать современное устройство печати даже за 1 ч непрерывной работы, невозможно просмотреть в приемлемое время ни одному пользователю.
На рис. 1, д приведена двоичная функция ограничения, которая характеризуется тем, что, как только рассматриваемый параметр превзойдет заданный минимальный уровень, функция ограничения сразу приобретет максимальное значение. Пример такой системы – синхронная передача данных: при стыковке дисплея с ЭВМ совершенно неважно, что линия может работать со скоростью в несколько млн. бод, поскольку дисплейный интерфейс работает со значительно меньшей скоростью (9600 бод), а на любой другой скорости передачи данных возникают искажения.
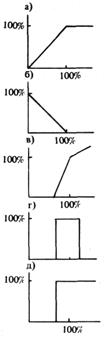
Рис. 1
Приведенные примеры не описывают весь возможный диапазон функций ограничения, которая может быть непрерывной, дискретной, разрывной, нелинейной и т.д. Кроме того, Fогр может меняться с течением жизни вычислительной системы или программного обеспечения, реализованного на данной ВС.
5. Распределение уровней технической возможности КТС
Поскольку каждому конфигурационному состоянию системы ставится в соответствие некоторая вероятность, а каждому параметру технических возможностей – некоторая величина, то вероятность достижения любого заданного уровня технической возможности определяется как сумма вероятностей пребывания в каждом из состояний с таким уровнем. Как правило, состояний, в которых достигается данный уровень некоторой технической возможности, достаточно много.
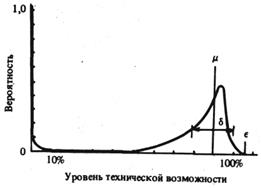
Рис. 2
Суммируя вероятности, относящиеся к каждому уровню параметра технических возможностей, можно построить функцию распределения вероятностей, подобную изображенной на рис. 2. Практически такая функция не может быть непрерывной, однако в таком виде ею значительно легче пользоваться.
Для каждого параметра технических возможностей имеется по одному такому распределению. Система, у которой отсутствует постепенная "деградация", на таком графике будет представлена двумя точками. Система более общего вида характеризуется подобной кривой, и именно это распределение описывает жизнеспособность системы.
Математическое ожидание распределения выражает ожидаемое значение рассматриваемого параметра, получаемое усреднением по всей совокупности возможных состояний. Отношение среднего значения параметра к максимальному называется эффективной жизнеспособностью ВС. Второй момент этого распределения характеризует спорадичность поведения системы, третий – показывает, насколько может ухудшиться положение перед окончательным выходом ВС из строя.
Показанное на рис. 2 распределение типично для системы с хорошей жизнеспособностью. Чем больше μ, тем меньше σ, и чем меньше пик при нулевом уровне рассматриваемого параметра, тем лучше качество системы. Подъем вблизи нуля показывает, что ВС имеет больше состояний, в которых она не работоспособна, чем это определяется уровнем технических возможностей.
Еще более удобный способ представления данных о жизнеспособности системы - построение кривых распределения интегральной вероятности различных параметров технических возможностей. В результате получим кривые, показанные на рис. 3. Кривая А типична для систем с постепенной деградацией; В – отражает более высокий уровень жизнеспособности; кривая D характерна для ВС, в которой высокая надежность отдельных блоков сочетается с малой собственной жизнеспособностью; Е – отражает работу системы в режиме двоичного отказа при нахождении точки разрыва далеко от начала, такая система близка к идеальной; кривая F является иллюстрацией получения высокой жизнеспособности за счет большого запаса надежности.
