Реферат: Поняття та класифікація систем радіоавтоматики
3. Типові системи радіоавтоматики
На практиці найчастіше використовуються такі типи систем РА: системи автоматичного визначення напрямку на джерело радіохвиль (системи АСН), системи автоматичного спостереження за частотою і фазою радіосигналу (системи АПЧ і ФАП), системи автоматичного спостереження за часовим положенням одного або кількох радіо- і відеоімпульсів (системи АСД), системи автоматичного регулювання підсилення (системи АРП).
Системи АСН поширені у радіолокації, радіонавігації, радіокеруванні. Вони призначені для виміру кутових координат об'єктів, що рухаються, і спостереження за їх просторовим положенням.
Системи АПЧ застосовуються у радіоприймальних пристроях з метою підтримки постійної проміжної частоти сигналу і як демодулятори частотно-модульованих коливань. Також системи АПЧ використовуються для стабілізації частоти коливань, що генеруються і як вузькосмугові фільтри, які перебудовуються по частоті. Системи ФАП використовуються для тих самих цілей, що й АПЧ, але відрізняються тим, що забезпечують підстроювання не тільки по частоті, але й по фазі коливань, тобто є чутливішими і точнішими системами.
Системи АСД широко застосовуються у радіолокації і радіонавігації для виміру дальності до обраної цілі і спостереження за її радіальними переміщеннями у просторі. Також ці системи здійснюють просторово-часову селекції декількох об'єктів.
Системи АРП застосовуються у радіоприймальних пристроях різних видів для стабілізації рівня сигналу на виході підсилювачів при великому динамічному діапазоні вхідного сигналу.
4. Математичний опис автоматичних систем
Будь-яка система радіоавтоматики (РА) складається з ряду елементів (ланок). Для кожного елемента характерний зв'язок між його входом і виходом. Він виражається диференціальним рівнянням. Система РА описується системою диференціальних рівнянь.
4.1 Складання диференціального рівняння елемента автоматичної системи
Конкретний вид диференціального рівняння залежить від фізичної природи і властивостей елемента.
Розглянемо як приклад інерційну RC- ланку (рис. 2):
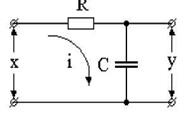
Рисунок 2 – Схема інерційної ланки
Якщо визначити х та y як відповідно вхідну і вихідну напруги цієї ланки, то згідно з теорією електричних кіл можна записати таке рівняння:
![]()
З урахуванням того, що
![]()
отримаємо таке рівняння:
![]()
Позначимо RC=T, тоді можна записати:
![]()
Уведемо до розгляду символ диференціювання за часом
![]()
Цей штучний (але по суті вірний) прийом дозволяє переписати отримане диференційне рівняння у формі:
![]()
Винесемо вихідну напругу y за дужки і остаточно отримаємо:
![]() .
.
Відзначимо, що вираз
