Реферат: Построение информационно-управляющей системы с элементами искусственного интеллекта
Решив выражение (3.1.2) относительно ![]() с учетом (3.1.3), получим
с учетом (3.1.3), получим
 (3.1.4)
(3.1.4)
где ![]() -вектор настраиваемых параметров регулятора (управляющего устройства), обеспечивающий качество регулируемого процесса.
-вектор настраиваемых параметров регулятора (управляющего устройства), обеспечивающий качество регулируемого процесса.
Учитывая то, что на состояние нестационарного объекта управления в каждом ![]() -том цикле может указать самонастраивающаяся модель объекта, положим в уравнении (3.1.4)
-том цикле может указать самонастраивающаяся модель объекта, положим в уравнении (3.1.4)
![]() (3.1.5)
(3.1.5)
Тогда выражение сигнала ошибки регулируемого процесса ![]() для каждого
для каждого ![]() -го цикла будет иметь вид
-го цикла будет иметь вид
 (3.1.6)
(3.1.6)
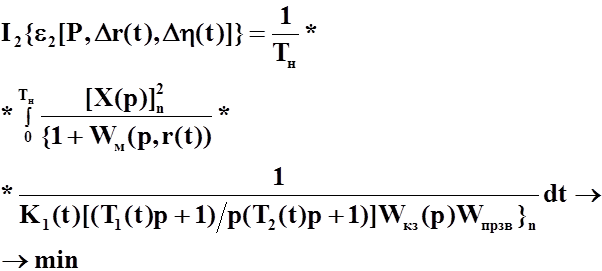
Подставляя значение ![]() выражения (3.1.6) в (3.1.1) имеем:
выражения (3.1.6) в (3.1.1) имеем:
(3.1.7)
Минимизируя функционал качества (3.1.7) по вектору настраиваемых параметров регулятора на интервале
![]() ,получим
,получим
(3.1.8)
где
 (3.1.9)
(3.1.9)
 (3.1.10)
(3.1.10)

(3.1.11)
Полученные выражения (3.1.8-3.1.11) описывают структуру и алгоритм функционирования системы анализа параметрического состояния нестационарного объекта управления в векторно-матричной форме.
Подставляя значения ![]() в (3.1.7), получим
в (3.1.7), получим
 (3.1.12)
(3.1.12)
Взяв частные производные от минимизируемого функционала качества ![]() по настраиваемым параметрам регулятора
по настраиваемым параметрам регулятора ![]() , с учетом выражения (3.1.8) получим:
, с учетом выражения (3.1.8) получим:
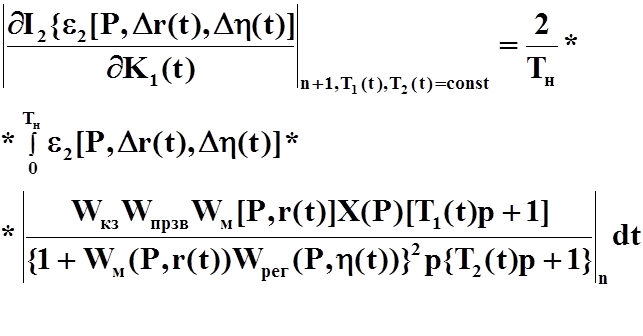
(3.1.13)
 (3.1.14)
(3.1.14)

Тогда
