Реферат: Применение и принципы радиоуправления
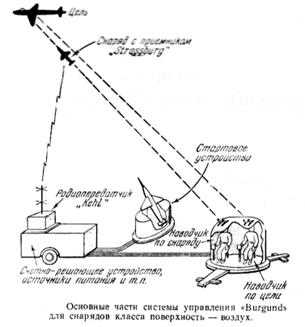
Измерение угловых координат цели и снаряда осуществляется с помощью оптических устройств. Слежение за целью и снарядом производится операторами-наводчиками. Они сидят на поворотной платформе. Наводчик на цель старается удержать цель на перекрестии своей оптики ручками управления. Тем самым он поворачивает платформу вместе с оптикой по азимуту, а также отдельно оптику как свою, так и другого наводчика – по углу места. Наводчик снаряда ручкой управления снарядом старается совместить снаряд с перекрестием своего оптического прибора, которое соответствует направлению на цель. Для улучшения видимости снаряда предлагалось устанавливать на нем факелы. Ручка управления снарядом связана с датчиком команд, которые по командной радиолинии (радиопередатчик Kehl – радиоприемник Strassburg) передавались на борт снаряда. Как следует из этого описания, при идеальном управлении снаряд должен все время находиться на линии визирования цели. Такой метод управления называется методом накрытия цели.
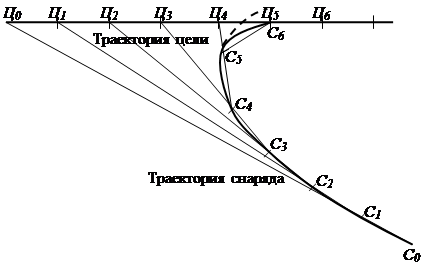
Траектория, по которой будет двигаться снаряд, может быть приближенно построена следующим образом. Считаем, что цель движется прямолинейно с постоянной скоростью. Разобьем траекторию цели на ряд малых участков Ц0 Ц1 , Ц1 Ц2 , Ц2 Ц3 и т.д., которые цель пролетает за малый интервал времени Dt. Длина каждого из участков равна произведению скорости цели VЦ на интервал времени Dt. Ниже показано построение траектории снаряда.
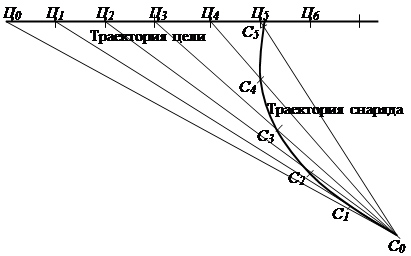 |
В момент старта снаряд находился в положении С0 , а цель – в положении Ц0 . Точка С0 соответствует месту расположения внешнего пункта управления и станции слежения за целью. Через время Dt цель переместится в точку Ц1 . Чтобы определить положение снаряда, проводим линию С0 Ц1 . Снаряд через время Dt должен находиться на этой линии, так как наведение производится по методу накрытия цели. Поэтому из точки С0 делается засечка радиусом VC Dt на линии С0 Ц1 . Получаем точку С1 . Еще через время Dt цель переместится в положение Ц2 . Снаряд должен находиться на линии “внешний пункт управления – цель”. Поэтому проводим линию С0 Ц2 и находим положение точки С2 , делая засечку из точки С1 радиусом VC Dt на линии С0 Ц2 . Продолжив такое построение для следующих точек С3 , С4 и т.д. и соединив все точки Сi плавной кривой, получим траекторию снаряда.
Метод накрытия цели характерен и для систем наведения по радиолучу. Использующаяся в этих системах радиолокационная станция следит за целью, то есть обеспечивает перемещение радиолуча вслед за перемещением цели. Как вы уже знаете после ознакомления с историей радиолокации, в первых РЛС сопровождения использовалось коническое сканирование луча. Радиолуч РЛС сопровождения представляет собой как бы пространственную воронку, ось которой совпадает с равносигнальным направлением. На оси “воронки” должна располагаться цель. На это же направление должен вывести себя и снаряд. На снаряде находится приемник, который принимает сигналы радиолокатора и определяет отклонение снаряда от равносигнального направления. По измеренному отклонению вырабатываются команды для управления снарядом.
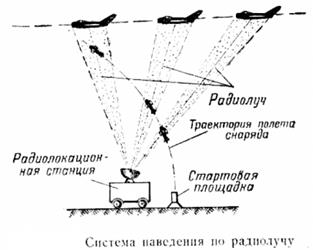
Ясно, что, чем уже диаграмма направленности РЛС, тем точнее определение местоположения цели и снаряда, то есть точнее наведение. Но в узкий луч очень трудно попасть снаряду после старта. Поэтому РЛС сопровождения формирует два луча: узкий – для наведения снаряда на цель и широкий – для ввода снаряда в луч после старта. Переключение приемника снаряда на работу с широкого луча на узкий производится автоматически.
Но наведение по методу накрытия цели является далеко не лучшим. Посмотрим на построенную траекторию снаряда. Она криволинейная, и путь, пройденный снарядом, длиннее расстояния между точкой старта снаряда и точкой встречи снаряда с целью. Почему так получилось? Потому что снаряд все время летит прямо на цель, а не в упреждающую точку, т.е. туда, где цель будет через некоторое время. Лучше всего было бы, если бы снаряд направлялся не на цель, а в точку встречи снаряда с целью. Это была бы самая экономичная траектория.
Такой самой экономичной траектории соответствует следующий метод наведения – метод параллельного сближения. Построим траекторию снаряда для этого метода при тех же исходных условиях, что и при методе накрытия цели. Правило построения такое: линия “цель – снаряд” во время всего движения остается параллельной самой себе.
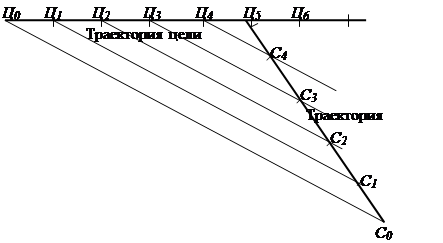 |
Процедура построения такая же, как и для метода накрытия цели, только линия “цель-снаряд” от шага к шагу строится по-другому. Сравните траектории снаряда для рассмотренных методов. Мало того, что траектория снаряда стала короче (при данных условиях она прямолинейна), но и встреча снаряда с целью произошла раньше.
Конечно, для реализации метода параллельного сближения недостаточно знания только угловых координат цели и снаряда. Для расчета упрежденной точки встречи нужно также знать дальности до цели и снаряда и их скорости. А в систему телеуправления необходимо ввести вычислитель для выработки команды управления.
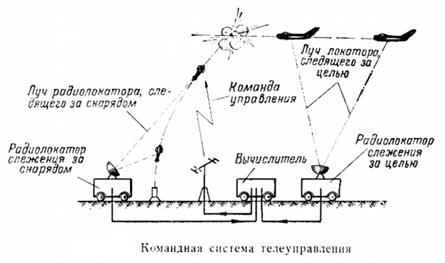
Радиолокаторы слежения за целью и слежения за снарядом автоматически определяют координаты цели и снаряда: угловые координаты, дальность и их производные. Эти данные поступают в вычислитель, который вычисляет координаты упреждающей точки, рассчитывает траекторию снаряда, определяет отклонение снаряда от расчетной траектории, т.е. ошибку наведения и формирует в соответствии с этой ошибкой команды, передаваемые по радиолинии управления на снаряд.
3. Самонаведение
Как правило, системы телеуправления не обеспечивают точности, необходимой для уничтожения цели (за исключением телеуправления через ракету). Причина в том, что с увеличением дальности увеличиваются ошибки измерения координат цели и снаряда, а это приводит к увеличению ошибок наведения. При самонаведении измеритель координат цели находится на снаряде. По мере приближения к цели ошибки измерения координат (особенно угловых!) уменьшаются, и, следовательно, ошибка наведения тоже уменьшается.
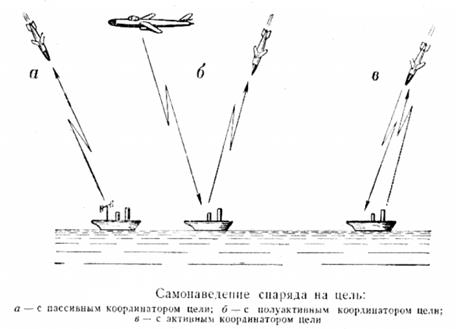
Если в системах телеуправления использовались только два типа измерителей координат: оптический (в первых попытках) и радиолокационный, то измерители координат (их также называют координаторами) в системах самонаведения более разнообразны. На рисунке на следующей странице показаны некоторые типы координаторов.
Тепловой, оптический и акустический координаторы улавливают излучение самой цели, и снаряд наводится на источник этого излучения. В радиолокационных координаторах наведение производится по радиосигналу, который излучается целью. В зависимости от того, как образуется этот радиосигнал, координаторы делятся на активные, полуактивные и пассивные. Активный координатор представляет собой РЛС слежения, в которую входит передатчик, облучающий цель, приемник, принимающий сигнал, отраженный от цели и устройство измерения координат. Полуактивный координатор содержит только приемник и устройство измерения координат, а передатчик, облучающий цель, находится в другом месте. Для пассивного координатора вообще не нужен передатчик, и координатор работает по радиоизлучению цели (работающие радиопередатчики различных радиотехнических систем и др.). Использование пассивного и полуактивного координаторов затрудняет обнаружение снаряда по его радиоизлучению

Активными и полуактивными могут быть не только радиолокационные координаторы, но и другие, например, оптические с лазерной подсветкой.
Если координатор жестко закреплен по оси снаряда, то наведение осуществляется по методу погони. Ниже построена траектория снаряда при принятых ранее условиях. Точки, определяющие положение снаряда через временные интервалы Dt, строятся как пересечение дуги радиуса VC Dt с линией, соединяющей снаряд и цель.
 |
Эту траекторию называют кривой погони, а также “собачьей кривой”, так как именно по такой траектории собака настигает свою жертву.
Недостаток такого метода наведения – большая крутизна траектории снаряда при подлете к цели. И если минимально возможный радиус разворота снаряда окажется больше радиуса окружности, описывающей траекторию на участке максимальной крутизны, то снаряд сойдет с расчетной траектории и пролетит мимо цели (пунктирная кривая на рисунке). Можно ли спрямить траекторию? Конечно можно, если направлять снаряд не на цель, а в упреждающую точку. Например, можно использовать наведение с фиксированным углом упреждения. Суть его заключается в том, что направление движения снаряда отличается от направления на цель на фиксированный угол a. Траектория снаряда при таком методе наведения построена ниже
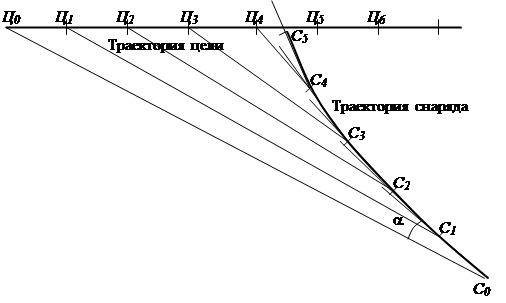
Линия, на которой будет находиться снаряд спустя время Δt после старта, повернута относительно линии С0 Ц0 на угол α. Дугой радиуса VсΔt делаем засечку на этой линии и получаем точку С1 . Из точки С1 проводится линия, повернутая относительно линии С1 Ц1 на угол α и на ней строится точка С2 и т. д.
Сравнивая построенную траекторию снаряда с траекторией, построенной ранее для метода параллельного сближения, замечаем, что линия снаряд – цель при наведении с фиксированным углом упреждения тоже перемещается, но не параллельно самой себе, а с некоторым изменением наклона. Причем это изменение наклона будет тем меньше, чем больше угол упреждения. Заметим также, что с увеличением угла упреждения траектория снаряда будет все более спрямляться. А может ли траектория стать прямолинейной? Да, если взять a = arctg (VЦ /VC ). Траектория снаряда при наведении с таким углом упреждения совпадает с траекторией снаряда для метода параллельного сближения. Угол упреждения больше этого значения брать нельзя, так как снаряд попадет в упреждающую точку раньше, чем туда прилетит цель.
Чтобы реализовать наведение с упреждением в системах самонаведения, нужно координатор цели делать подвижным относительно корпуса снаряда. Такой координатор все время следит за целью независимо от ориентации оси снаряда. Кроме того, усложняется и сам координатор, так как он должен определять не только угловые координаты цели, но и дальность и их производные.
Первые управляемые снаряды снабжались, как правило, одной из рассмотренных выше систем управления. Современное управляемое оружие должно обладать большой дальностью действия и высокой, близкой к единице, вероятностью поражения цели. Поэтому используется несколько систем управления, которые включаются последовательно. Сначала с помощью систем автономного управления или телеуправления управляемый объект выводится в район цели, и обеспечивается захват цели системой самонаведения. Затем система самонаведения подводит управляемый объект к цели на расстояние, достаточное для ее поражения.
4. Радиовзрыватель