Реферат: Применение робототехники в хирургии. Преимущества и недостатки системы Да Винчи
Выполнила: студентка 318 группы
лечебного факультета
Умёнушкина Е.А
Научный руководитель:
Ковшова М.В
Санкт-Петербург 2011
Содержание
Введение
1. История робототехники в хирургии
2. Основное описание системы daVinci
3. Достоинства и недостатки системы daVinci
4. Робототехника сегодня
Заключение
Список литературы
Введение
Проведение хирургических операций с помощью роботов уже не является сюжетом из научно-фантастического произведения. Использование их в клинике стало не просто возможным, но и весьма перспективным. Хотя у большинства людей "робот" ассоциируется с именем Айзека Азимова, первым этот термин ввел чешский писатель Карел Чапек для обозначения механизма, обладающего так называемыми антропоморфными свойствами. На производстве и в научных исследованиях применяются промышленные роботы - программно-управляемые автоматические манипуляторы, выполняющие рабочие операции со сложными пространственными перемещениями. Доктор Davies в своей работе, посвященной достижениям робототехники, дал следующее определение для робота, используемого в хирургических целях: "… управляемая система, наделенная чувствительностью и запрограммированная для выполнения движений и манипулирования инструментами при проведении хирургических операций".
На данный момент роботов, используемых в хирургии, можно разделить на пассивных, полуактивных и активных.
Пассивный робот предназначен, как правило, для удержания инструмента в определенном положении, что облегчает выполнение и увеличивает точность какого-либо этапа оперативного вмешательства. Изменять положение инструментов система может только с помощью хирурга. Примером может служить использование робота для удержания иглы при проведении биопсии в нейрохирургии. Полуактивный робот выполняет ряд запрограммированных манипуляций, в определенной последовательности осуществляя движения в различных направлениях и плоскостях. Такой робот используется, например, для протезирования коленного сустава. Активный робот оснащен манипуляторами, подобными рукам хирурга, и фактически сам приводит в движение инструменты. В настоящее время такими системами дистанционно управляет хирург, а механические руки робота воспроизводят движения его кистей и пальцев, увеличивая точность, уменьшая усталость и устраняя тремор. Активные системы используются для трансуретральной простатэктомии, эндоскопической телероботохирургии.
Следует подчеркнуть, что задачей робота является не замещение хирурга, а расширение спектра его возможностей.
1. История робототехники в хирургии
Первый хирургический робот Unimate Puma 560 был создан в конце 1980-х в Америке. Этот робот, по сути, являлся большой рукой с двумя когтистыми отростками, которые могли вращаться друг относительно друга. Амплитуда движений – 36 дюймов. Робот имел довольно ограниченный спектр движений, использовался в нейрохирургии для удерживания инструментов при проведении стереотаксической биопсии.
В 1986 году Калифорнийский университет в Дэвисе и исследовательский центр Томаса Дж. Уотсона корпорации IBM начали совместную работу по созданию робота-хирурга. В 1992 году компания CUREXO Technology Company на основе результатов этих исследований создала систему помощника хирурга, которая так и называлась - Robodoc Surgical Assistant System. Спустя несколько лет CUREXO Technology Company была награждена престижной премией Computerworld Smithsonian Award в номинации Инновации в Искусстве и Науке в Медицине под названием Integrated Surgical System (ISS). К настоящему времени с использованием системы ROBODOC® проведено 24 000 операций, что показало меньшую травматичность и большую точность в сравнении с операциями, проводимыми вручную. ROBODOC® - хирургический робот предназначен для всех основных операций по артропластике - первичная полная артропластика тазобедренного сустава, ревизия тазобедренного сустава, полная артропластика коленного сустава.
Основные этапы применения:
1. Точное КТ сканирование Предоперационное планирование начинается с КТ сканирования пациента, после чего появляется точная структура кости для представления в систему ORTHODOC. Запатентованное программное обеспечение форматирует КТ снимок на экран из 4 рабочих окон, показывается сустав в 3 плоскостях и его трехмерное изображение (уникальная технология) кости.
2. Трехмерное изображение Использование в работе трехмерного изображения сустава позволяет выбрать подходящий имплантат, соответствующий анатомической структуре. Имплантат выбирается из предустановленной базы, включающей самые современные имплантаты мировых производителей. Возможность увидеть сустав в разных плоскостях помогают хирургу в планировании операции, кроме того врач сразу видит виртуальный результат операции в трехмерном пространстве.
3. Разработка предоперационного плана.
Планирование операции с использованием системы ORTHODOC - точная длина ноги и полный объем движений и как результат точное расположения протеза. Кроме того процесс планирования операции помогает избежать проблем и отклонений во время хирургического вмешательства. После процесса планирования операции информация передается на вспомогательную машину ROBODOC Surgical Assistant.
4. Установка.
После предоперационного планирования операции информация загружается в ROBODOC Surgical Assistant, робот устанавливается в операционной, пациент позиционируется, используя специальные фиксаторы, затем хирург вскрывает сустав. После вскрытия сустава робот показывает хирургу, куда необходимо приложить специальный регистратор (DigiMatch™) для получения наиболее точной пространственной картины кости.
5. Хирургическая точность.
Под контролем хирурга, рука робота наводится на операционное поле. Затем робот начинает пилить кость с субмиллиметровой точностью. После подготовки кости к имплантации рука робота удаляется из операционного поля и хирург устанавливает протез так, как это было спланировано заранее.
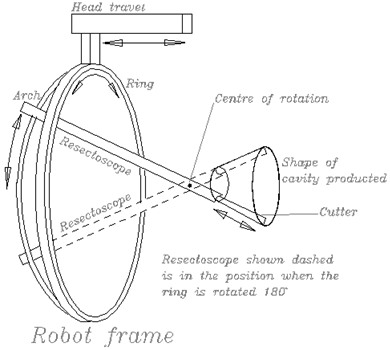
В те же девяностые годы в Имперском Колледже в Лондоне был создан робот для трансуретральной резекции гиперплазированной предстательной железы - Probot, допущенный к клиническим испытаниям в 1996 году. Он состоит изтрех осейдвиженияичетвертой осидля перемещениярезектоскопа, как показано рисунке.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--