Реферат: Принцип действия и конструктивные особенности магнитоэлектрических измерительных преобразователей и электростатических измерительных приборов
Принцип работы и основные технические характеристики электромеханических ИП во многом зависят от вида преобразователя, обеспечивающего преобразование энергии электрического измерительного сигнала в механическую энергию перемещения подвижной части ИП.
Общим для всех электромеханических ИП является то, что они состоят из неподвижной и подвижной частей и ряда общих деталей и узлов. Подвижная часть в большинстве преобразователей может совершать угловое перемещение вокруг неподвижной оси. Механический момент, возникающий в результате воздействия на преобразователь измерительного сигнала и обусловливающий поворот его подвижной части в соответствии со значением измеряемой величины, называется вращающим моментом MВР. Этот момент должен однозначно зависеть от преобразуемой величины X и в общем случае от угла a поворота подвижной части ИП:
MВР = f(X, a). (1)
В зависимости от варианта преобразования различают приборы:
1) магнитоэлектрические;
2) электромагнитные
3) электростатические приборы;
3) электродинамические;
4) индукционно-измерительные.
1 Магнитоэлектрические измерительные преобразователи
Магнитоэлектрические преобразователи выделяются среди других групп электромеханических преобразователей широтой и разнообразием применения, высокими метрологическими характеристиками, а также многотипностью. Отечественной промышленностью серийно выпускаются магнитоэлектрические преобразователи вплоть до класса точности 0,05 и с минимальным током полного отклонения до 0,1 мкА.
Наиболее широко магнитоэлектрические преобразователи используются при создании амперметров и вольтметров постоянного тока, омметров, гальванометров постоянного тока, баллистических гальванометров для измерений малых количеств электричества, а также приборов для измерений в цепях переменного тока (осциллографические гальванометры, вибрационные гальванометры, выпрямительные, термоэлектрические и электронные приборы на базе магнитоэлектрических преобразователей).
Принцип действия магнитоэлектрических преобразователей основан на взаимодействии магнитных полей постоянного магнита и проводника с током, конструктивно выполненного в виде катушки (рамки).
Практически все магнитоэлектрические преобразователи можно разделить на две основные разновидности:
- преобразователи с подвижной катушкой и неподвижным магнитом;
- преобразователи с неподвижной катушкой и подвижным магнитом.
Конструктивно преобразователи обеих разновидностей могут быть выполнены:
- с внешним (по отношению к рамке) магнитом;
- с внутрирамочным (внутренним) магнитом.
Кроме того, они мoгут различаться креплением подвижной части, способом создания противодействующего момента, способом успокоения подвижной части и др.
В настоящее время более широкое применение получили магнито-электрические преобразователи с неподвижным магнитом и подвижной катушкой (рисунок 1).
Катушка 5 с числом витков w и площадью витка s находится в магнитном зазоре с равномерным радиальным магнитным полем. Поле в зазоре создается с помощью магнитной системы, состоящей из постоянного магнита 7, полюсных наконечников с цилиндрической расточкой 6 и цилиндрического сердечника 4 из магнитомягкого материала. Благодаря введению в магнитную систему сердечника 4, поле в зазоре, где движется рамка, получается однородным. Для изготовления магнита 7 используют материалы с большой коэрцитивной силой, чаще всего железоникельалюминиево-кобальтовые сплавы. Магнитопроводы и полюсные наконечники выполняют из магнитомягких материалов, чаще всего из низкоуглеродистых электротехнических сталей. Подвижная часть крепятся на полуосях и керновых опорах (в высокочувствительных приборах - на растяжках и подвесах). Противодействующий момент может создаваться механическим (с помощью спиральных пружин 3) или электрическим путем. Катушка 5 наматывается на легком алюминиевом каркасе и жестко крепится на полуосях. При движении катушки в магнитном зазоре в каркасе возникают вихревые токи, создающие момент успокоения . Если получаемый таким образом момент успокоения недостаточно велик, то на каркас катушки дополнительно наматывается необходимое количество короткозамкнутых витков, увеличивающих момент успокоения до нужного значения.
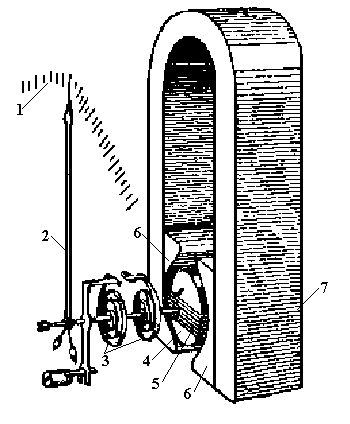
Рисунок1 – Конструкция магнитоэлектрического преобразователя
Самыми разнообразными по номенклатуре и наиболее широко используемыми приборами, создаваемыми на основе магнитоэлектрических преобразователей, являются амперметры, вольтметры, гальванометры и омметры для измерений в цепях постоянного тока.
Амперметры. Как уже отмечалось ранее, магнитоэлектрические измерительные механизмы могут непосредственно использоваться для измерений силы электрического тока. Для этого они включаются в электрическую цепь последовательно с участком, ток через который необходимо измерить (рис 3а). Внутреннее сопротивление RА такого амперметра равно сумме внутреннего сопротивления измерительного механизма Ri и термокомпенсирущего резистора RТК (рисунок 2.3,б), если последний используется в амперметре. Сопротивление Ri представляет собой последовательно соединенные сопротивление катушки преобразователя RК и сопротивление токоподводящих элементов RТ, т.е. Ri = RК + RT. Таким образом, внутреннее сопротивление амперметра равно либо RA = Ri - для амперметра, не содержащего термокомпенсирующих преобразователей, либо RA = Ri + RTK - для амперметра, содержащего термокомпенсирующий резистор RTK.
Так как RA в обоих случаях является конечной величиной, режим электрической цепи после включения в нее амперметра изменится, т.е. измеренное значение тока IИЗМ протекающего через нагрузку RH при включении в цепь амперметра, будет отличаться от действительного значения тока I, протекающего через RH до начала измерений. Однако данная погрешность является систематической и может быть вычислена и исключена из результата измерений.
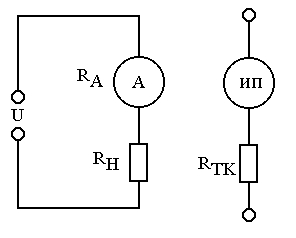
| а | б |
Рисунок 2 – Амперметр на базе магнитоэлектрического преобразователя
Вольтметры. Магнитоэлектрические вольтметры образуются путем включения измерительного преобразователя последовательно с добавочным резистором RД (рисунок 2.4,a). Полученный таким образом прибор подключается параллельно участку цепи, падение напряжения на котором необходимо измерить (рисунок 2.4,б).
--> ЧИТАТЬ ПОЛНОСТЬЮ <--