Реферат: Пристрої реєстрації інформації
Зменшення розмірів повзунка приводить до зниження маси рухливої системи, що складається з головки, повзунка й важеля переміщення головки. Це, у свою чергу, дозволяє перемішати їх з більшими прискореннями. Крім того, при цьому можна зменшити розміри зони "паркування" головок ("посадкової смуги") і відповідно збільшити корисну площу дисків Нарешті, завдяки меншій площі контактної поверхні повзунка зменшується неминуче зношування поверхні носія в процесі розкручування й зупинки дисків.
Мабуть, ще більш важливою деталлю накопичувача, чим самі головки, є механізм, що встановлює їх у потрібне положення й називається приводом головок. Саме з його допомогою головки переміщаються від центра диска до його країв і встановлюються на заданий циліндр. Існує багато конструкцій механізмів привода головок, але їх можна розділити на два основних типи:
з кроковим двигуном;
з рухливою котушкою.
Тип привода багато в чому визначає швидкодію й надійність накопичувача, вірогідність зчитування даних, його температурну стабільність, чутливість до вибору робочого положення й вібрацій. Скажемо відразу, що накопичувачі із приводами на основі крокових двигунів набагато менш надійні, чим пристрої із приводами від рухливих котушок. Привод- найважливіша деталь накопичувача.
У накопичувачів із приводом на основі крокового двигуна середня швидкість доступу до даних досить низька (тобто великий час доступу). Вони чутливі до коливань температури й вибору робочого положення під час операцій читання й записи, у них не здійснюється автоматичне паркування головок (тобто переміщення їх на безпечну "посадкову смугу" при вимиканні живлення). Крім того, звичайно один або два рази в рік їх доводиться переформатувати, щоб привести реальне розташування зон запису у відповідність із розміткою заголовків секторів. У накопичувачах на гнучких дисках для переміщення головок використовується привод із кроковим двигуном. Його точність виявляється цілком достатньою для дисководів цього типу, оскільки щільність доріжок запису на гнучких дисках значно нижча (135 доріжок на дюйм), чим у накопичувачах на жорстких дисках (більше 5 000 доріжок на дюйм). У більшості накопичувачів, що випускають на сьогоднішній день, установлюються приводи з рухливими котушками.
Привід з рухливою котушкою (рисунок 4.12) використовується практично у всіх сучасних накопичувачах. На відміну від систем із кроковими двигунами, у яких переміщення головок здійснюється наосліп, у приводі з рухливою котушкою використовується сигнал зворотного зв'язку, щоб можна було точно визначити положення головок щодо доріжок і скорегувати їх якщо буде потреба. Така система дозволяє забезпечити більше високу швидкодію, точність і надійність, чим традиційний привод із кроковим двигуном.
Привод з рухливою котушкою працює за принципом електромагнетизму. Його конструкція нагадує конструкцію звичайного гучномовця. Як відомо, у гучномовці рухлива котушка, з'єднана з дифузором, може перемішатися в зазорі постійного магніту. При протіканні через котушку електричного струму вона зміщається разом з дифузором щодо постійного магніту. Якщо струм у котушці періодично змінюється (у відповідності зі звуковим електричним сигналом), то виникаючі при цьому коливання дифузора породжують сприйманий людиною звук. У типовій конструкції привода рухлива котушка жорстко з'єднується із блоком головок і розміщується в поле постійного магніту.
На відміну від привода із кроковим двигуном, у пристроях з рухливою котушкою немає заздалегідь зафіксованих положень. Замість цього в них використовується спеціальна система наведення (позиціювання), що точно підводить головки до потрібного циліндра (тому привод з рухливою котушкою може плавно переміщати головки в будь-які положення).
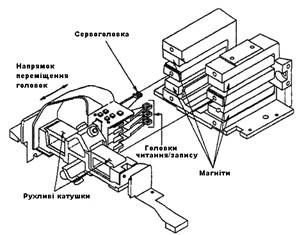
Рисунок 12 – Привід з рухливою котушкою
При вимиканні живлення потрібно витримати тисячі "зльотів" й "посадок" головок, але бажано, щоб вони відбувалися на спеціально призначені для цього ділянках поверхні дисків, на яких не записуються дані. При цих "зльотах" й "посадках" відбувається зношування (абразія) робочого шару. З-під головок вилітають "клуби пилу", що складаються із часток робочого шару носія. Якщо ж під час "зльоту" або "посадки" відбудеться струс накопичувача, то ймовірність ушкодження головок і дисків істотно зросте.
Одним з переваг привода з рухливою котушкою є автоматичне паркування головок. Коли живлення включене, головки позиціюються й утримуються в робочому положенні за рахунок взаємодії магнітних полів рухливої котушки й постійного магніту. При вимиканні живлення поле, що втримують головки над конкретним циліндром, зникає й вони починають безконтрольно сковзати по поверхнях ще не зупинених дисків, що може стати причиною ушкоджень. Для того щоб запобігти можливим ушкодженням накопичувача, поворотний блок головок приєднується до зворотної пружини. Коли комп'ютер включений, магнітна взаємодія звичайно перевершує пружність пружини. Але при відключенні живлення головки під впливом пружини переміщаються в зону паркування до того, як диски зупиняться.
Майже у всіх накопичувачах на жорстких дисках використовується два повітряних фільтри: фільтр рециркуляції й барометричний фільтр. На відміну від змінних фільтрів, які встановлювалися в старих накопичувачах більших машин, вони розташовуються усередині корпуса накопичувача й не підлягають заміні протягом усього його терміну служби (рисунок 13).
У старих накопичувачах відбувалося постійне перекачування повітря зовні усередину пристрою й навпаки крізь фільтр, який потрібно було періодично міняти. У сучасних пристроях від цієї ідеї відмовилися. Фільтр рециркуляції в блоці HDA призначений тільки для очищення внутрішньої "атмосфери" від невеликих часток робочого шару, які, незважаючи на всі міри все-таки осипаються із дисків при "зльотах" й "посадках" головок. Оскільки накопичувачі персональних комп'ютерів герметизировані й у них не відбувається перекачування повітря зовні, вони можуть працювати навіть в умовах сильного забруднення навколишнього повітря.
Двигун, що приводить в обертання диски, часто називають шпиндельним (spindle). Шпиндельний двигун завжди пов'язаний з віссю обертання дисків - ніякі приводні ремені або шестірні для цього не використовуються. Двигун повинен бути безшумним - будь-які вібрації передаються дискам і можуть привести до помилок при зчитуванні й записі.
Частота обертання двигуна повинна бути строго певною. Звичайно вона коливається від 3 600 до 7 200 об/хв або більше, а для її стабілізації використовується схема керування двигуном зі зворотним зв'язком (автопідстроюванням), що дозволяє домогтися бажаної точності. Таким чином, контроль за частотою обертання двигуна здійснюється автоматично, і ніякі пристрої, що дозволяють зробити це вручну, у накопичувачах не передбачені. В описах деяких діагностичних програм говориться, що з їхньою допомогою можна виміряти частоту обертання дисків. Насправді єдине, на що вони здатні, - це оцінити її можливе значення по тимчасових інтервалах між моментами появи заголовків секторів. Виміряти частоту обертання за допомогою програми в принципі неможливо, для цього потрібні спеціальні прилади (тестери).
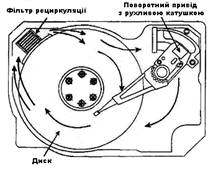
Рисунок 13 – Циркуляція повітря в накопичувачі на жорсткому диску
У більшості накопичувачів; шпиндельний двигун розташовується в нижній частині, під блоком HDA. Однак у багатьох сучасних пристроях він вбудовується усередину блоку HDA й являє собою центральну частину блоку дисків-носіїв.
5.3 Інтерфейс управління жорсткими дисками.
Основний інтерфейс, використаний для підключення жорсткого диска до сучасного PC, називається IDE (Integrated Drive Electronics). Факти?