Реферат: Проектирование и технология радиоэлектронных средств
F2 = Мнас ×W×T×H2 ,
где H1 и H2 напряжённость магнитного поля на верхней и нижней грани пластины (в текущей конфигурации H1 < H2 ). Величина H1 и H2 линейно зависит от соответствующего расстояния до поверхности электромагнитного источника. Пластина вместе с пермаллоевым участком рассматривается как твёрдое тело так как она существенно толще консольной балки. Основываясь на этом предположении систему сил, упрощают, перемещая F1 до совмещения с F2 . Результатом является вращающий момент, действующий против часовой стрелки и сосредоточенная сила, воздействующая на нижнюю грань структурной пластины. Этот результат можно представить как:
Ммаг = F1 ×L×cosθ
F = F2 - F1
Вращающий момент всегда стремится уменьшить полную энергию в системе актюатора, выравниванием вектора намагниченности с силовыми линиями внешнего магнитного поля.
Фотография магнитного микроактюатора, полученная на сканирующем электронном микроскопе, представлена на рис. 5.
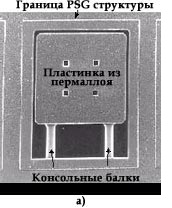
Рис. 5
Примером магнитного микроактюатора другой конструкции может служить линейный мотор, показанный на рис 6. Магнит, расположенный в канале, движется взад-вперёд при переключении тока в обмотках, то с одной, то с другой стороны канала.
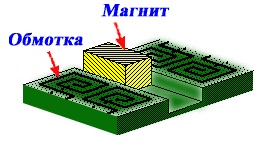
Рис. 6
Общая проблема, связанная с магнитными актюаторами, заключается в том, что обмотки двумерны (трёхмерные обмотки очень тяжело изготовить на микроуровне). Вдобавок ограничен выбор магнитного материала - выбираются только те материалы, которые легко обработать на микроуровне, и получается, что не всегда материал магнита выбирается оптимально. Во многом из-за этого магнитные актюаторы потребляют большое количество энергии и рассеивают много тепла. Следует отметить, что для изготовления микроскопических компонентов (размером до нескольких миллиметров) электростатические устройства обычно выгоднее магнитных, однако при более больших размерах магнитные устройства превосходят электростатические.
8. Пьезоэлектрические актюаторы
В основе теории пьезоэлектрических актюаторовлежит прямой пьезоэлектрический эффект - появление электрических зарядов разного знака на противоположных гранях некоторых кристаллов при их механических деформациях: сжатии, растяжении и т.п и обратный пьезоэлектрический эффект - состоит в деформации этих же кристаллов под действием внешнего электрического поля. Основная формула для прямого эффекта:
[Формула 10 (Рис.1)],
для обратного:
[Формула 11 (Рис.1)],
где Di - вектор электрического смещения, Ej- напряжённость электрического поля, Ek- относительная деформация, σk- механическое напряжение. Основными параметрами являются: dik - пьезоэлектрические коэффициенты, Sik- коэффициенты упругой деформации, коэффициенты диэлектрической проницаемости Eik.
На рис. 7 показано два простых примера, демонстрирующих принцип действия пьезоэлектричекских актюаторов. На рис. 7-а слой пьезоэлектрика осаждён на балку. При приложении напряжения балка изгибается. Такой же принцип можно применить и с тонкой кремниевой мембраной (рис. 7-b). Если приложить напряжение, мембрана деформируется.
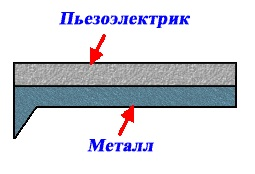
Рис. 7а
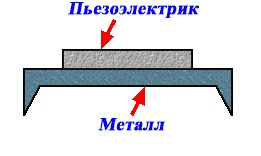
Рис. 7б
Наибольшую популярность имеют следующие конструкции пьезоэлектрических Микроактюаторов (Рис. 8).
Рис. 8
9. Гидравлические актюаторы
Гидравлические микроактюаторы имеют значительный потенциал, так как они могут передавать довольно много энергии от внешнего источника по очень узким трубкам. Это факт можно использовать в таких местах как наконечник катетера, смонтированного микрохирургического инструмента.
Для производства микротурбин может использоваться LIGA технология (рис. 9). Эта микротурбина обеспечивает энергией режущий микроинструмент.
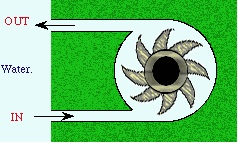
Рис. 9
К особенностям гидравлических микроактюаторов можно отнести то, что он имеет довольно большие размеры, высокий уровень выходных сил и может иметь крайне низкое трение.