Реферат: Проектирование радиолокационной станции для обнаружения надводных целей в пределах речного шлюза
На такой большой частоте очень сложно реализовать генератор с необходимой стабильностью, поэтому необходимо генерировать меньшую частоту, а потом увеличивать её в умножителях частоты до нужного значения. Для стабилизации частоты наиболее целесообразно применить кварцевый резонатор (рисунок 4.1).
 |
????? ???????? ??????????? ??????????????? ??????????, ????? ???????????? ??? ????? ??????? ??????? ? ????????? ??????????????. ?? ??????? ?????????? ??????? ?????????? ????? ???????? ??? ????????????? ?????? ???????? ?????????? ??????????. ? ?????? ?????? ??????? ??????? ??????? ?????????? 150 ???. ????? ???????? ??????????? ??????? ????????? ???????, ????????? ???????? ????????? ?????????? ? ????????? ???, ??? ????? ??????????????? ??? ???????????????? ??????? ????????? ??????? ? 5, ? 5 ? ? 2 ????. ????? ?????????? ????????? ??????????? ? ???????????? ??????? ?? ??????? ?????? ????????.
Рисунок 4.1 – Блок-схема передатчика РЛС
После усиления необходимо отфильтровать полученный сигнал от высших гармоник, появившихся в результате работы нелинейного элемента (транзистора) в усилительном каскаде. Эту функцию выполняет выходная колебательная система, выполненная в виде фильтра низких частот. Кроме того, она обеспечивает согласование антенны с усилителем, то есть преобразовывает нагрузочное сопротивление антенны в эквивалентное сопротивление нагрузки оконечного каскада.
С выходной колебательной системы готовый радиолокационный сигнал поступает в антенну и излучается в пространство.
4.2 Разработка структурной схемы приемника
Приемный тракт проектируемой радиолокационной станции должен усилить принятые приемной антенной отраженные от цели сигналы, произвести их фильтрацию, при которой обеспечивается максимальное различение полезных эхо-сигналов и помех, и извлечь из него полезную информацию.
Можно было бы реализовать супергетеродинный приемник с нулевой промежуточной частотой, функцию гетеродина в котором выполняет просачивающийся сигнал от передатчика, но такие приемники не достаточно чувствительны вследствие повышенного шума на низких промежуточных частотах, обусловленного так называемым фликкер-эффектом (мерцательный шум). Величину мерцательных шумов можно сделать небольшой по сравнению с нормальным шумом супергетеродинного приемника, используя достаточно большую промежуточную частоту, это объясняется обратно пропорциональной зависимостью мерцательных шумов от частоты
Радиолокатор должен измерять скорости движения целей, что реализовывается на основе эффекта Доплера.
 |
??????? 4.2 ? ????-????? ???????? ????????????? ?????????? ????????
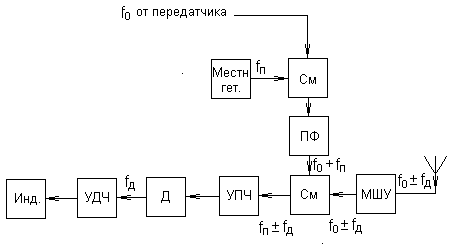
На рисунке 4.2 приведена блок-схема приемника радиолокатора с непрерывным излучением, который работает на ненулевой промежуточной частоте. Вместо обычного местного гетеродина используется опорный сигнал, получаемый при смешении части сигнала передатчика и местного сигнала, частота которого равна промежуточной частоте приемника. Так как выходной сигнал смесителя состоит из двух боковых полос, расположенных по обе стороны от несущей, а так же более высоких гармоник, то в качестве опорного сигнала с помощью узкополосного фильтра выбираем верхнюю из боковых полос. В данной схеме стабильность частоты передатчика не влияет на работу приемника, так как отклонение частоты f0 компенсируется таким же отклонением опорной частоты, и промежуточная частота остается неизменной. Гораздо легче обеспечить стабильность частоты местного гетеродина, чем приемника, так как она гораздо меньше. Промежуточная частота fп =5 МГц.
Однако подобный приемник определяет только модуль скорости и не может определить направление.
 |
??????? 4.3 ? ????-????? ????????? ??????????? ??????????? ?????????? ???????? ? ?? ????????.
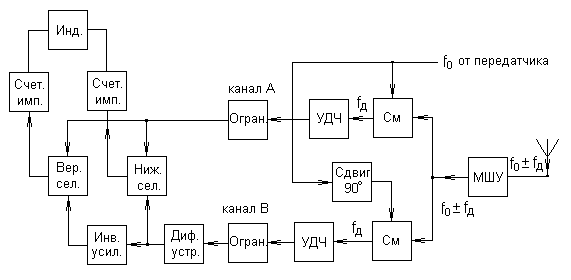
Знак доплеровского сдвига частоты и, следовательно, направление движения цели можно определить, разделив принятый сигнал по двум каналам (рисунок 4.3). Принятый сигнал разветвляется по каналам А и В и подводится к отдельным смесителям. Часть сигнала передатчика подается непосредственно к смесителю канала А. В канале В опорный сигнал от передатчика претерпевает сдвиг на 90˚. В результате между доплеровскими частотами, возникающими в обеих каналах, имеется сдвиг фазы на 90˚. Знак фазового сдвига определяет направление движения цели.
Для определения знака фазового сдвига на 90˚ оба сигнала сначала усиливаются и ограничиваются. Сигнал от ограничителя В дифференцируется, кроме того изменяется его полярность. Выходной сигнал от ограничителя А и дифференцированный выходной сигнал от В сравниваются в схеме совпадения, обозначенной «верхний селектор». При положительных сигналах верхний селектор генерирует импульс, что указывает на удаление цели. При приближении цели схема совпадений верхнего селектора не дает выходного сигнала. Появление сигнала на выходе схемы совпадения «нижний селектор», возникающего при сравнении выходного сигнала ограничителя А с выходным сигналом инвертирующей схемы, указывает на приближение, а не на удаление цели. Подсчет импульсов от двух схем совпадения позволяет определить направление и величину доплеровского сдвига частоты.
Каждый из приемников имеет свои достоинства и недостатки, объединение первого и исключение второго, приводит к совмещению двух схем приемников. Кроме того, радиолокационная станция должна обнаруживать ещё и неподвижные цели, то есть не имеющих доплеровского сдвига. Для этого вводится канал С, в котором производится усиление промежуточной частоты в усилителе УПЧ, после чего пороговое устройство принимает решение о наличии или отсутствии цели (рис. 2.3.4)
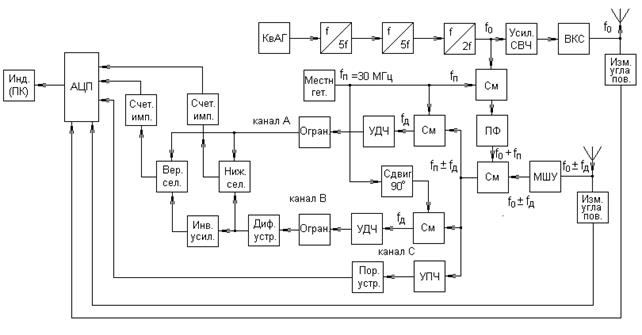
Рисунок 4.4 – Структурная схема РЛС.
Рисунок 4.4 представляет собой структурную схему радиолокационной станции. Антенны снабжаются устройствами измерения угла поворота, которые определяют азимутальные углы поворота антенн, а следовательно, координаты цели. Сигналы с измерителей угла поворота и все обработанные в приемнике сигналы приходят на аналогово-цифровой преобразователь и затем уже информация, преобразованная в цифровой сигнал, поступает на индикатор, в роли которого выступает персональный компьютер.
5 РАСЧЕТ АВТОГЕНЕРАТОРА
Рассчитаем задающий генератор. Его основной функцией является генерация синусоидальных колебаний заданной частоты с необходимой стабильностью. Рабочая частота генератора fр =150 МГц,
Расчет производится по методике изложенной в [5]. Необходимую стабильность частоты обеспечиваем с помощью кварцевого резонатора.
Выберем транзистор. Для увеличения стабильности частоты в задающих автогенераторах выбирают транзисторы малой мощности. Чтобы фазовый сдвиг между колебаниями тока коллектора и напряжения базы можно было устранить с помощью корректирующей цепочки, следует выбирать транзистор, граничная частота fт которого больше, чем заданная частота колебаний fр . Этим требованиям удовлетворяет транзистор 2Т368А со следующими параметрами:
| - граничная частота, fт , МГц | 900; |
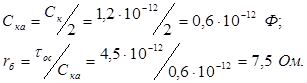
| - постоянная времени цепи внутренней обратной связи τос , пс | 4,5; |
| - емкость коллекторного перехода Cк , пФ | 1,2; |
| - емкость эмиттерного перехода Cэ , пФ | 3; |
| - статический коэффициент передачи по току в схеме с ОЭ | 50; |
| - крутизна переходной характеристики в граничном режиме Sгр , мА/В | 30; |
| - допустимый ток коллектора Iк доп. , мА | 30; |
| - допустимое напряжение на коллекторе Uк доп. , В | 15; |
| - допустимое напряжение на базе Uб доп. , В | 4; |
| - допустимая мощность рассеяния Pрас доп. , мВт | 225; |
| - напряжение отсечки Uотс. , В | 0,6; |
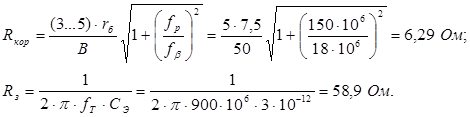
Произведем расчет корректирующей цепочки.
 |
????????? ???????:
 |
???????? ????? ???????????? ??????? ? ????????????? ?????? ? ????:
 |
?????????? ???????? ?????????????? ???????:
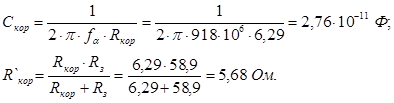 |
Эффективность применения корректирующей цепи зависит от соотношения между Rкор и Rз – требуется выполнение условия Rкор <Rз . Данное условие выполняется.
???? ????????? ?????? ???????? ?????????? ??????????????. ?????????? ?? ? ?????? ?????????????? ???????.
 |
?????? ?????????????? ?????? ?????? ???????????. ???????? ??????????? ?????? ?? ???????????????, ? ??? ?? ??????? ??????? ???????? ????????? ???????, ??? ? ???????????? ?????? ????????? γ1 (θ)=0,2?0,3. ????? ???????? ???? ??????? θ=60˚
Значения коэффициентов Берга для угла отсечки θ=60˚:α0 =0,218; α1 =0,391; γ0 =0,109.
Выберем значение коэффициента обратной связи. Наибольшая стабильность частоты в транзисторном автогенераторе получается при Kос =1…3. Обычно в задающих автогенераторах на биполярных транзисторах выбирают Kос =1.
Рассчитаем основные параметры генератора:
????????? ?????? ????????? ????????????? ????:
????????? ?????????? ???????????? ?????