Реферат: Проектирование станочного приспособления для операции Сверление детали Вал (WinWord 2000 CorelDraw 9.0)
Вывод схема базирования выбрана верно.
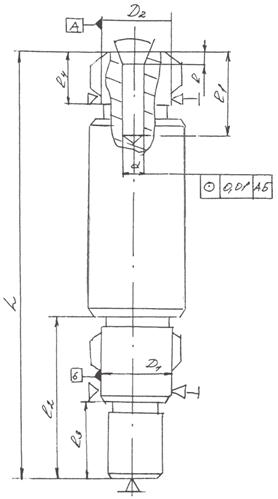
 2.3. Окончательный точностной расчет.
2.3. Окончательный точностной расчет.
Суммарную погрешность обработки найдем по формуле:
Ùå = 1.73 ´ ÙH + 1.73 ´ Ùи + 1.73 ´ Ùд + Ö Eб 2 + Ед 2 + Ест 2
где Ùи - погрешность, связанная с размерным износом инструмента
Ùи = 0,02мм
Ùд - погрешность, связанная с температурной и упругой деформацией СПИД
Ùд = 0,015мм
ÙН - погрешность, связанная с настройкой инструмента
ÙН = 0,1бт = 0,1 ´ 0,3 = 0,03мм
Еб =0, т.к. используется станок 2Н118А
Ез = 0, т.к. сила зажима направлена перпендикулярно установочным элементам.
Eст - погрешность станка нормальной точности
Ест = 0,05мм,
Ùå = 1,73 ´ 0,02 + 1,73 ´ 0,015 + 1,73 ´ 0,03 + 0.05 =0,163 мм
Сравним полученную погрешность с заданным допуском
Ùå = 0,163 < 0,3 =бт 4
Вывод: получаемая погрешность не выходит за границы допуска. 3. Силовой расчет приспособления.
3. Силовой расчет приспособления.
3.1. Схема силового замыкания.
Для выбранной схемы установки приведем схему силового замыкания
Положение тела в системе координат:
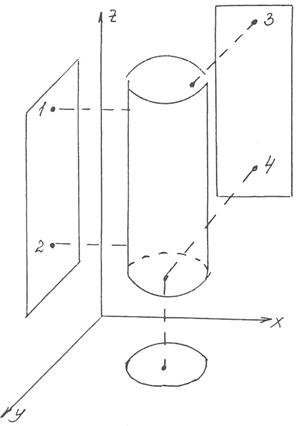
à плоскость 1 ограничивает одно движение, т.е. 1 степень свободы.
à плоскость 2 ограничивает три движения, т.е. 2 степени свободы.
à плоскость 3 ограничивает три движения, т.е. 2 степени свободы.
Ограничение вращения вокруг оси Z достигается силой зажима Waз .
Таблица для анализа ограничения движений
| Оси координат | Перемещение | Вращение | ||
| + | - | + | - | |
| x | Wx | |||
| y | Wy | |||
| z | Wz | W3 | W3 | |
 Величину необходимого зажимного усилия определим на основе решения задачи статики, рассматривая заготовки под действием приложенных к ней сил. Для этого составим расчетную схему.
Величину необходимого зажимного усилия определим на основе решения задачи статики, рассматривая заготовки под действием приложенных к ней сил. Для этого составим расчетную схему.
 | 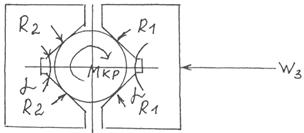 |
Из схемы видно, что под действием осевой силы заготовка переместится не сможет, т.к. имеется упор, т.е. Ро = Рос .