Реферат: Программно-аппаратная реализация аппаратов электростимуляции
Необходимо разработать интерфейс пользователя, т.е. обеспечить возможность ввода параметров процедуры и получения информации о работе устройства. При этом используется широкий спектр приборов, начиная от кнопок, и заканчивая сенсорными экранами, от светодиодов до ЖК мониторов. Кроме того, необходимо обеспечить связь с персональным компьютером (протоколы RS232, USB, TCP/IP). Это позволяет быстро задавать параметры терапевтических процедур, делает возможным применение терапевтического аппарата в комплексе с другими устройствами, позволяет легко анализировать диагностические данные.
Практически, возможны две концепции построения медицинской аппаратуры: однопроцессорное и мультипроцессорное решение. При сравнении этих вариантов необходимо учитывать следующие параметры: независимые каналы терапевтического воздействия, интерфейс пользователя, связь устройства с ПК, внутренняя память устройства.

Рисунок 9. – Однопроцессорная терапевтическая система
При разработке однопроцессорной системы (рис.9) необходимо корректно выбрать процессор. Высокопроизводительные процессоры являются дорогостоящими. Системы со слабыми процессорами сложно модифицировать. Кроме того, есть риск, что эти процессоры снимут с производства. Выбранный интерфейс связи с персональным компьютером (ПК) должен быть аппаратно реализован в процессоре. Это экономит процессорное время для решения более важных задач. Определив требования к системе, необходимо продумать структуру программного обеспечения (ПО). Разработчиксталкивается с проблемой задержек в работе процессора (при отсчете временных интервалов и обработке прерываний, при одновременной работе двух таймеров для одного независимого канала, один для отсчета длительности импульса и второй для отсчета полуволны). Кроме того, при реализации связи с ПК, необходимо исключить возможность переполнения буфера. Дополнительные проблемы возникают при необходимости расширении возможностей системы (например, вместо трех, необходимо четыре канала). При увеличении количества задач, возникает необходимость в многозадачной операционной системе. Программа может быть разбита на более понятные, независимые задачи, и может быть легко дополнена дополнительными заданиями. Однако при этом требования к производительности процессора возрастают на два порядка. Кроме того, такая система не может работать в режиме реального времени, что необходимо для генерации терапевтических сигналов. Для устранения этих проблем, необходимо использовать операционную систему реального времени, а так же подходящий процессор.
Идея мультипроцессорной системы (рис.10) заключается в распределении задач между несколькими микропроцессорами или микроконтроллерами. Небольшие (низкопроизводительные и дешевые) процессоры выполняют задачи реального времени, такие как генерация терапевтических сигналов, прием и обработки диагностической информации. Центральный процессор используется для реализации интерфейса пользователя и связи с ПК, для задания начальных условий работы и обработки поступающих данных. Так как задачи реального времени решаются другими устройствами, центральный процессор может быть гораздо менее мощным, по сравнению с однопроцессорными решениями и не требует операционной системы реального времени. Важным этапом при создании мультипроцессорных систем является разработка шины данных. Необходимо разработать структуру подобную шинам SPI или I2 C с возможностью передачи данных от ведущего к ведомому и наоборот. Обычно центральный процессор контролирует процесс передачи данных. Иногда возникает необходимость в дополнительном контроллере передачи данных. В таком случае необходимо использовать шины с возможностью работы нескольких ведущих (подобно I2 C). Аппаратная поддержка шины может сэкономить время на разработку программы и процессорное время.
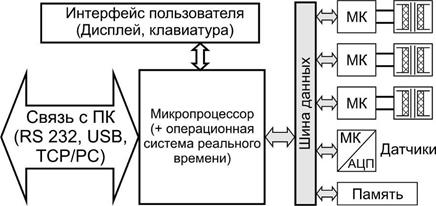
Рисунок 10 – Многопроцессорная терапевтическая система
Таким образом, при создании систем обоих типов, могут возникнуть трудности. При однопроцессорном варианте необходимо разработать операционную систему, работающую в режиме реального времени. Системы являются более надежными, однако расширение такой системы может быть ограничено аппаратными мощностями процессора. Для мультипроцессорной системы в свою очередь возникают проблемы с взаимодействием центрального и периферических процессоров. Необходимо устранять ошибки передачи данных, разработать шину передачи, выбрать и реализовать протокол обмена. Однако разработать такую систему обычно проще. Дополнительный терапевтический или диагностический канал может быть реализован простым добавлением к шине еще одного процессора. Если рассматривать безопасность пациента, можно отметить что в случае сбоя в однопроцессорной системе, стимуляция прекращается по всем каналам. Это хорошо, например, для систем электростимуляции периферической мускулатуры, однако, в случае кардиостимуляции или электростимуляции дыхания это может привести к смерти пациента. В случае сбоя одного из процессоров многопроцессорной системы, выходит из строя только один канал.
ЛИТЕРАТУРА
| 1. | Системы комплексной электромагнитотерапии: Учебное пособие для вузов/ Под ред А.М. Беркутова, В.И.Жулева, Г.А. Кураева, Е.М. Прошина. – М.: Лаборатория Базовых знаний, 2000г. – 376с. | 2000 |
| 2. | Электронная аппаратура для стимуляции органов и тканей /Под ред Р.И.Утямышева и М.Враны - М.: Энергоатомиздат, 2003.384с.. | 2003 |
| 3. | Электрическая стимуляция мозга и нервов у человека / Н.П.Бехтерева, С.В.Медведев, А.Н.Шандурина и др. – Л.:Наука, 1990. -263с. | |
| 4. | Ливенсон А.Р. Электромедицинская аппаратура. :[Учебн. пособие] - Мн.: Медицина, 2001. - 344с. | 2001 |
| 5. | Катона З. Электроника в медицине: Пер. с венг. / Под ред. Н.К.Розмахина - Мн.: Медицина 2002. - 140с. | 2002 |