Реферат: Разработка интегрированного стартер-генератора на основе вентильно-индукторной машины
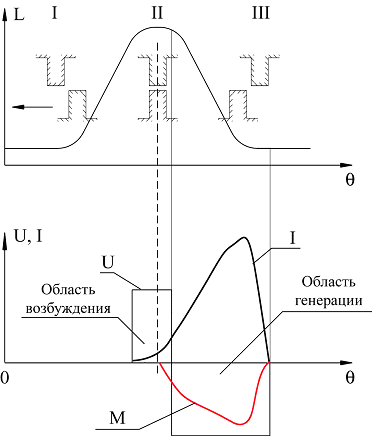
Рис.6 Генераторный режим работы ВИМ
Регулировка выходного напряжения генератора осуществляется изменением длительности режима возбуждения по показаниям датчика положения ротора. В тех случаях, когда точность регулировки по углу коммутации недостаточна, ее осуществляют по показаниям датчиков тока, которые также служат для регулировки токов в стартерном режиме с целью их ограничения. Генераторные режимы ВИМ для различных условий эксплуатации обсуждаются в [7], [8], [9].
Стартер-генераторное устройство на основе ВИМ
Стартер-генератор - это электрическая машина, предназначенная для кратковременной работы в двигательном режиме и продолжительной работы в режиме генератора. Стартер-генератор автомобиля, помимо этого, должен обеспечивать кратковременный бустерный режим, при котором на валу ДВС создается дополнительный двигательный момент.
Стартер-генератор на базе ВИМ - вентильно-индукторный стартер-генератор (ВИСГ) - имеет ряд особенностей по сравнению с ВИМ общего назначения, связанных как с конструкцией, так и с режимами работы.
ВИСГ имеет большой диаметр вала ротора, что вызвано интеграцией его с диском сцепления автомобиля. Сцепление размещается внутри ротора ВИСГ, который также выступает маховиком ДВС. Длина активной части, как правило, небольшая и обусловлена размещением ВИСГ в автомобиле.
Диапазон скоростей вращения ВИСГ, как в стартерном, так и в генераторном режиме, должен быть широким и полностью покрывать диапазон рабочих скоростей вращения ДВС. Особенность ВИСГ заключается в том, что существует диапазон скоростей вращения, при которых ВИМ должна работать и как стартер, и как генератор, что исключается при проектировании ВИМ на один из режимов (рис.7а). Таким образом, диапазоны рабочих скоростей стартера и генератора должны взаимно перекрываться (рис.7б).
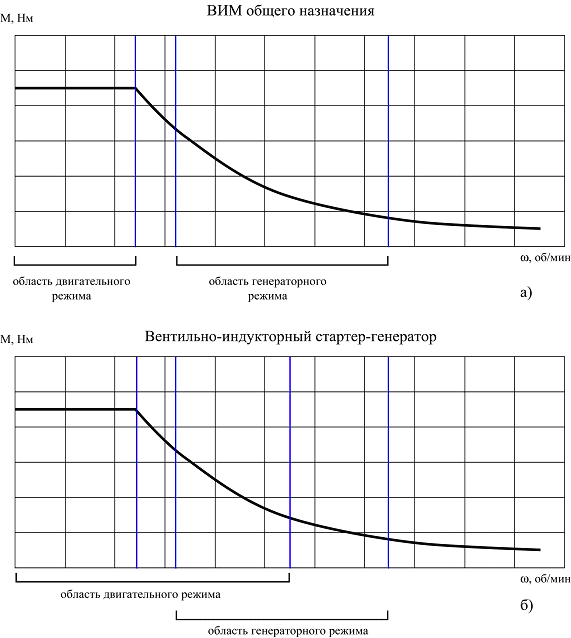
Рис.7 Диапазоны рабочих скоростей ВИМ и ВИСГ
ВИСГ автомобиля должен обладать высоким пусковым моментом, что в сумме с низким напряжением питания, обусловленным низким напряжением бортовой сети, и широким рабочим диапазоном частот вращения, затрудняет его проектирование.
Математическое моделирование процессов в ВИСГ
Процессы, происходящие в ВИСГ, ввиду своей сложности и нелинейности, не могут быть рассмотрены на основе аналитических выражений и зависимостей. Этим также объясняется сложность проектирования данного класса машин. Структура статора и ротора должны быть принципиально зубчатыми, иначе становиться невозможным преобразование энергии на основе реактивного момента. Магнитное поле ВИМ носит более сложный характер, чем в традиционных машинах [3].
Рассмотреть процессы электромеханического преобразования энергии в ВИМ можно путем математического моделирования электромеханической системы, включающей в себя ИМ, и блок управления.
При этом принимаются следующие допущения:
взаимная индуктивность фаз равна нулю, так как коммутация фаз ВИСГ симметричная одиночная;
потери в стали и механические потери ВИМ не учитываются;
ключи блока коммутации считаются идеальными, т.е. осуществляют коммутацию без временных задержек и падения напряжения на них;
демпфирующая емкость принимается бесконечно большой;
нагрузка в генераторном режиме считается активной.
В основу математической модели положены нелинейные дифференциальные уравнения электрической цепи содержащей переменные индуктивности обмоток и уравнения движения.
Уравнения для стартерного режима
Уравнение электрической цепи для одной фазы
![]() , где
, где
![]() - потокосцепление фазы ИМ;
- потокосцепление фазы ИМ;
![]() - сопротивление фазы ИМ;
- сопротивление фазы ИМ;
![]() - нелинейная зависимость тока фазы от потокосцепления и взаимного положения зубцов статора и ротора.
- нелинейная зависимость тока фазы от потокосцепления и взаимного положения зубцов статора и ротора.
![]() - зависимость напряжения на фазе ИМ от времени, формируемая по алгоритму коммутации фаз.
- зависимость напряжения на фазе ИМ от времени, формируемая по алгоритму коммутации фаз.
Зависимость ![]() определяется из расчета магнитного поля ВИМ, с учетом нелинейностей магнитных проводимостей стали, путем сплайн-аппроксимации точек поверхности
определяется из расчета магнитного поля ВИМ, с учетом нелинейностей магнитных проводимостей стали, путем сплайн-аппроксимации точек поверхности ![]() . На основе данной зависимости строится зависимость
. На основе данной зависимости строится зависимость ![]() , позволяющая однозначно определить ток фазы ВИМ по потокосцеплению катушки и относительному положению зубцов
, позволяющая однозначно определить ток фазы ВИМ по потокосцеплению катушки и относительному положению зубцов
Уравнение движения:
![]()