Реферат: Разработка системы синхронизации положения траверсы гидравлического пресса усилием 75000тс
![]() и
и ![]() - соответственно номинальные паспортные значения частоты вращения роторов электродвигателя и насоса.
- соответственно номинальные паспортные значения частоты вращения роторов электродвигателя и насоса.
Расчетная номинальная мощность на валу ротора насоса при дроссельном регулировании скорости
 ,
,
где ![]() - расчетная мощность на валу ротора насоса, кВт;
- расчетная мощность на валу ротора насоса, кВт;
![]() - расчетное значение номинального давления на выходном штуцере насоса ( точка А ), МПа;
- расчетное значение номинального давления на выходном штуцере насоса ( точка А ), МПа;
![]() - значение номинальной производительности ( подачи ) на выходном штуцере насоса ( точка А ), м3 /с;
- значение номинальной производительности ( подачи ) на выходном штуцере насоса ( точка А ), м3 /с;
![]() - общий КПД выбранного типоразмера насоса.
- общий КПД выбранного типоразмера насоса.
 кВт.
кВт.
Выбираем трехфазный асинхронный электродвигатель с короткозамкнутым ротором 4А132М4У3, имеющий следующую техническую характеристику:
номинальная мощность - 4 кВт>2 кВт;
синхронная частота вращения - 25 об/с=![]() =25 об/с;
=25 об/с;
масса – 100 кг.
3 РАЗРАБОТКА МИКРОКОНТРОЛЛЕРНОЙ СИСТЕМЫ УПРАВЛЕНИЯ
3.1 ВЫБОР МИКРОКОНТРОЛЛЕРА
Для обработки информации с датчиков положения, выполнения алгоритма работы и подачи управляющих сигналов на исполнительную гидравлическую аппаратуру применяем 28-выводный микроконтроллер PIC14000, тактовая частота которого без применения кварцевого резонатора 4МГц, объем ОЗУ 192 байта, 22 линии ввода-вывода, объем ПЗУ 4Кх14.
Данный микроконтроллер – дешевое микроэлектронное устройство, имеет достаточные технические характеристики для обслуживания разрабатываемой системы синхронизации.
Основные функции микроконтроллера в разрабатываемой системе – это опрос четырех датчиков положения, десяти датчиков давления, шести элементов фильтрации рабочей жидкости, проведение расчетов по алгоритму работы и выдача сигналов управления на предохранительные клапаны, дросселирующие распределители и приводные электродвигатели.
Функциональная схема микроконтроллерной системы управления представлена на рисунке 3.1.
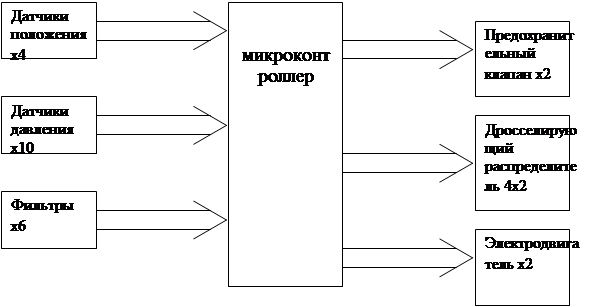 |
Рисунок 3.1 – Функциональная схема микроконтроллерной системы управления
3.2 ВЫБОР ДАТЧИКА ПОЛОЖЕНИЯ И РАСЧЕТ СХЕМЫ СОПРЯЖЕНИЯ С МИКРОКОНТРОЛЛЕРОМ
Для обеспечения измерения рабочего диапазона перемещения траверсы используем закрытую систему измерения линейных перемещений на базе фотоэлектрической линейки LS-623 со следующими техническими характеристиками:
- рабочий диапазон измерений – 2540мм;
- межштриховой шаг – 20мкм;
- системная точность ![]() 10мкм;
10мкм;
- разрез линейки (высота х толщина) 75х37мм.
Система имеет прямоугольные импульсы (ТТL-выход).
Выбранная система измерения линейных перемещений удовлетворяет всем требованиям по монтажу, габаритным размерам и диапазону измерения.
Схема сопряжения датчика положения с микроконтроллером представляет собой набор счетчиков, которые считают импульсы от датчика и через регистр-защелку передают данные в порт микроконтроллера.
Расчет необходимых параметров схемы сопряжения выполняем для рабочего хода траверсы при максимальной скорости движения ![]() =30 мм/с и минимальной скорости движения
=30 мм/с и минимальной скорости движения ![]() =0,2 мм/с. Опрос датчиков положения необходимо организовать через каждые 2 секунды – время переходного процесса системы синхронизации по положению (определено при моделировании системы).
=0,2 мм/с. Опрос датчиков положения необходимо организовать через каждые 2 секунды – время переходного процесса системы синхронизации по положению (определено при моделировании системы).
С учетом того, что шаг линейки 0,02 мм (50 импульсов за 1с),
при ![]() =30мм/c: за 2с количество импульсов от датчиков=2×30×50=3000имп.;
=30мм/c: за 2с количество импульсов от датчиков=2×30×50=3000имп.;
при ![]() =0,2мм/c: за 2с количество импульсов от датчиков=2×0,2×50=20имп.
=0,2мм/c: за 2с количество импульсов от датчиков=2×0,2×50=20имп.
Т.о. опрос датчика положения контроллер будет вести через каждые 20 импульсов.
Для подсчета импульсов от датчика положения выбираем четырех разрядный счетчик К555ИЕ7.
Необходимое количество микросхем счетчиков для подсчета 20 импульсов – 2 шт., т.к. 20 в двоичном коде =25 (два 4-х разрядных счетчика).
Для фиксирования информации на выходе счетчика импульсов используем RS-триггер.
Логический элемент “И” К555ЛИ5, сигнал на выходе которого служит для установки информации на триггере и обнуления старшего счетчика импульсов.
В системе всего 4 датчика положения, информация с которых поступает на один порт А микроконтроллера.
После считанной информации с триггеров микроконтроллер через порт С сбрасывает те триггеры в 0, с которых прочитана информация. При этом в соответствующих регистрах накопителях ведется подсчет суммарного положения траверсы относительно нижнего штампа.
Принципиальная схема сопряжения датчика положения с микроконтроллером представлена на рисунке 3.2.
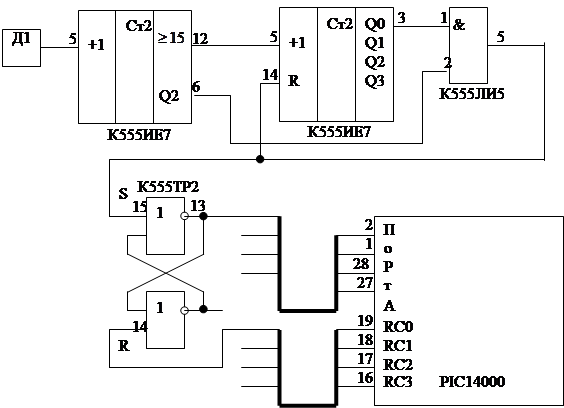
Рисунок 3.2 – Принципиальная схема сопряжения датчика положения с микроконтроллером
3.3 ПРОЕКТИРОВАНИЕ СХЕМЫ СОПРЯЖЕНИЯ МИКРОКОНТРОЛЛЕРА С ДАТЧИКАМИ АВАРИЙНЫХ СИТУАЦИЙ
Сигналы с датчиков давления и фильтрующих элементов необходимо подавать на порт ввода микроконтроллера через оптроны АОТ123А для преобразования уровней сигнала в TTL. Т.к. общее число обрабатываемых сигналов равно 16, а порт ввода микроконтроллера 8-разрадный, то необходимо применить шифратор К155ПР6. Принципиальная схема сопряжения микроконтроллера с датчиками аварийных ситуаций приведена на рисунке 3.3.
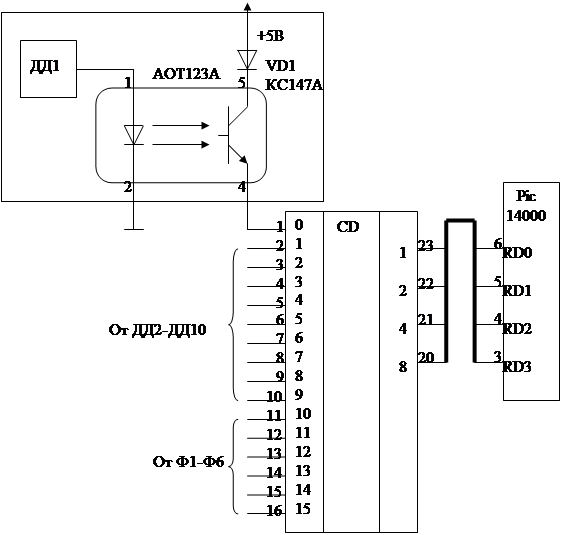 |
Рисунок 3.3 – Принципиальная схема сопряжения микроконтроллера с датчиками аварийных ситуаций
3.4 ПРОЕКТИРОВАНИЕ СХЕМЫ СОПРЯЖЕНИЯ МИКРОКОНТРОЛЛЕРА С УПРАВЛЯЕМОЙ АППАРАТУРОЙ
Управляющие сигналы с порта вывода микроконтроллера подаются на предохранительные клапаны и дросселирующие распределители, номинальное напряжение которых 24В. для сопряжения сигналов применяем транзисторные оптроны АОТ123Б. Сигналы управления электродвигателями через оптроны подают питающее напряжение на электромагнитное реле постоянного тока РЭС-6, замыкающие контакты которого подают напряжение на электродвигатель.
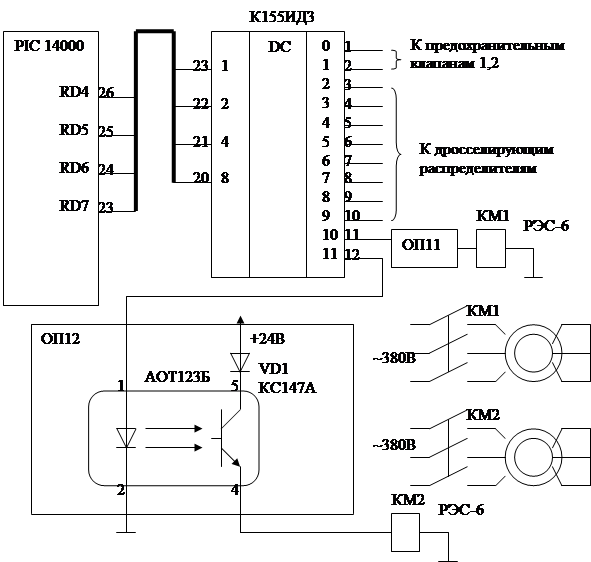 Принципиальная схема сопряжения микроконтроллера с управляемой аппаратурой приведена на рисунке 3.4.
Принципиальная схема сопряжения микроконтроллера с управляемой аппаратурой приведена на рисунке 3.4.
Рисунок 3.4 – Принципиальная схема сопряжения микроконтроллера с управляемой аппаратурой
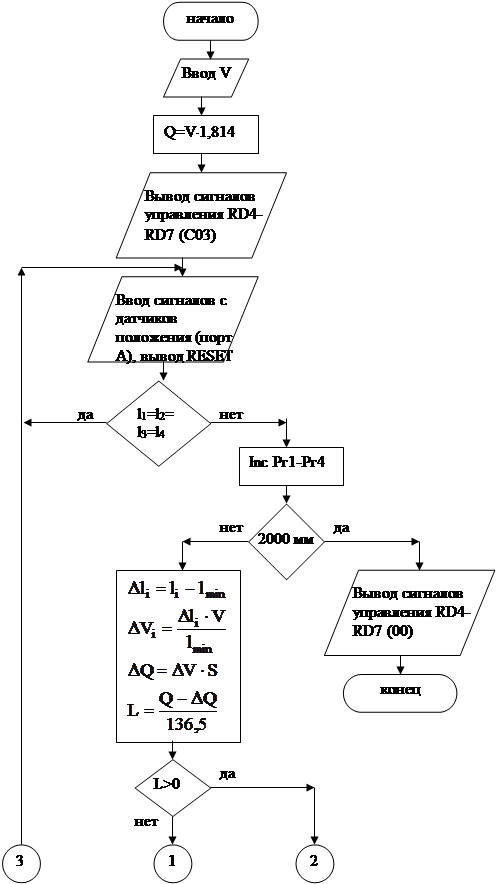
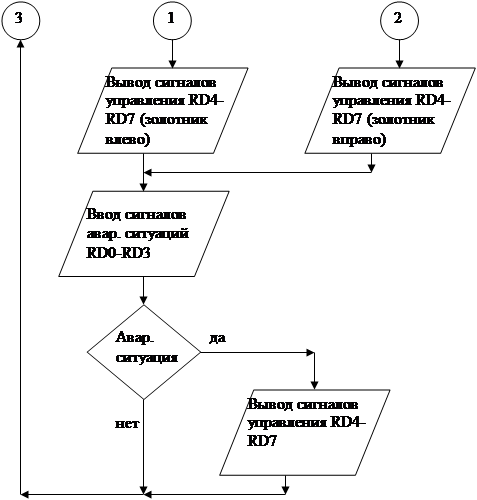
3.5 РАЗРАБОТКА БЛОК СХЕМЫ АЛГОРИТМА
Алгоритм работы программы основан на измеряемом значении положения траверсы с помощью четырех систем измерения линейных перемещений. При появлении перекоса траверсы показания датчиков положения будут различны. Минимальное значение всех датчиков принимается за необходимое, определяется отклонение показаний остальных датчиков. По этим отклонением рассчитывается изменение скорости от номинального значения и соответственно необходимое уменьшение расхода жидкости в синхронизирующих гидроцилиндрах. По линейной зависимости расхода жидкости через управляемый клапан от величины подъема разгрузочного клапана (величины хода поршня управляющего гидроцилиндра), представленной на рисунке 3.5, определяется необходимое положение поршня управляющего гидроцилиндра.
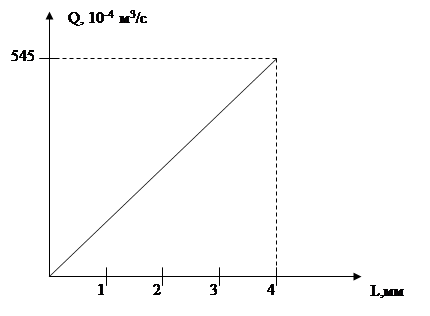 |
Рисунок 3.5 – График зависимости расхода жидкости через клапан от хода поршня управляющего гидроцилиндра
![]() .
.
Вычислив необходимое положение поршня цилиндра микроконтроллер выдает управляющие сигналы на исполнительную гидроаппаратуру.
 | |
 |
4 РАЗРАБОТКА ДИНАМИЧЕСКОЙ МОДЕЛИ ОБЪЕКТА
После проведения расчетов и выбора гидравлической аппаратуры возможна разработка динамической модели системы, с помощью которой имеется возможность исследовать поведение системы в динамике.
Для составления модели необходимо рассчитать передаточные функции дросселирующего распределителя, рабочего органа (гидроцилиндра), при необходимости корректирующих устройств. Ожидаемый переходной процесс до установления значения перемещения поршня гидроцилиндра в напорном клапане – апериодический без перерегулирования, с малым временем переходного процеса.
Гидроприводы , оснащенные гидроаппаратурой с пропорциональным электрическим управлением , имеют стандартные узлы : электронный усилитель – сумматор БУ2110 и пропорциональный магнит ПЭМ6. Передаточные функции указанных гидроаппаратов: