Реферат: Разработка системы управления асинхронным двигателем с детальной разработкой программ при различных законах управления
Как уже было отмечено, высокими энергетическими характеристиками обладают системы с регулированием магнитного потока в функции нагрузки. Увеличить их динамические характеристики можно путем форсировки статорного напряжения (тока) во время переходных процессов и частых формирований управляющих воздействий. Получить высокую надежность можно за счет применения упрощенной системы регулирования, отказа от встроенных в двигатель и механически связанных с ротором датчиков.
На рис. показана структурная схема системы, поддерживающей постоянство угла между векторами тока статора (I1) и потокосцепления ротора (Y2) , что равнозначно поддержанию постоянства относительного скольжения двигателя. Система управления состоит из: задатчика интенсивности (1); программируемого контроллера (2); блока широтно - импульсного модулятора (3); асинхронного электродвигателя с короткозамкнутым ротором (4); датчика тока (5) и блока определения угла (6). Поддержание постоянства угла между I1 и Y2 обеспечивает работу двигателя в области номинального режима с максимальными значениями КПД и cos(j). Кроме того, привод, обладая абсолютно жесткой механической характеристикой, что обусловлено постоянством относительного скольжения, получает возможность точного регулирования скорости вращения ротора путем изменения частоты поля.
Для технической реализации системы с поддержанием постоянства коэффициента полезного действия электродвигателя необходимо знать либо мгновенные величины относительного скольжения либо величину угла между током статора и потокосцеплением ротора. Измерить скольжение можно с помощью электромеханического или цифрового датчика скорости, угол между I1 и Y2 - с помощью датчиков напряжения и датчиков фазных токов. Так как датчик скорости существенно повышает стоимость системы регулирования, эксплуатационные затраты и ухудшает общую надежность системы, то более предпочтителен вариант системы с обратной связью по углу между векторами тока статора и потокосцепления ротора.
Существующие в настоящее время методы определения угла между I1 и Y2 , например [1, 2, 3], имеют низкое быстродействие (не более шести измерений искомого угла за один оборот вектора поля) и невысокую точность измерения, обусловленную “дрейфом нуля” аналоговых элементов схемы и вводом в алгоритм определения углов активного сопротивления статора, значение которого изменяется в широких пределах при нагреве двигателя.
Рассмотрим алгоритм определения угла между I1 и Y2 , лишенный вышеуказанных недостатков. Для обоснования алгоритма построим векторную диаграмму асинхронного двигателя с короткозамкнутым ротором, отложив вдоль действительной оси Ra ток намагничивания I0 , определенный по известным реактивным параметрам асинхронного двигателя и измеренным значениям фазных токов и напряжений [4].
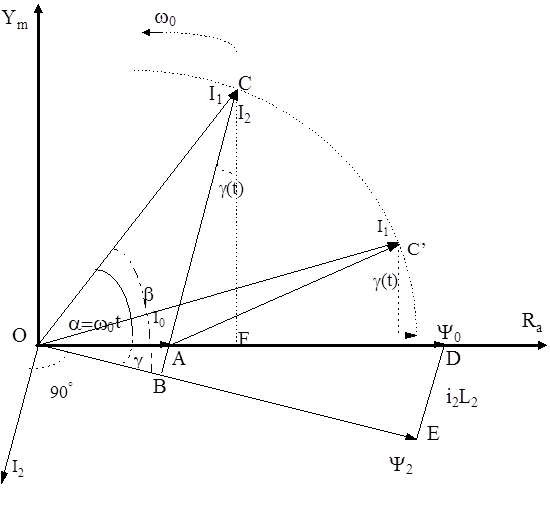
Значение углов между I1 и Y2 можно определить в реальном масштабе времени, когда вращение вектора тока статора статора I1 определяется частотой питания асинхронного двигателя и в ускоренном масштабе времени, когда вращение вектора тока I1 определяется в модели выбранным шагом временного интервала и быстродействием микропроцессорной системы. Второй вариант измерения углов более предпочтителен, так как позволяет осуществить больше измерений. По измеренным значениям фазных токов двигателя определяем величину вектора тока I1 и совмещаем его в модели с действительной осью Ra, а затем переводим (в произвольный момент времени t1 ) вектор тока I1 в неподвижную, относительно статора, систему координат, то есть начинает выполняться программа, согласно которой вектор тока I1 поворачивается против часовой стрелки со скоростью, определяемой быстродействием микропроцессорной системы и выбранным шагом временного интервала.
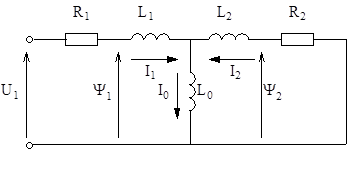 |
Из Т-образной схемы замещения (рис. 3) видно, что ![]() , то есть векторы тока и потокосцепления ротора взаимно перпендикулярны. В процессе поворота угол между векторами I0 и Y2 g(t) будет изменяться согласно выражения:
, то есть векторы тока и потокосцепления ротора взаимно перпендикулярны. В процессе поворота угол между векторами I0 и Y2 g(t) будет изменяться согласно выражения: 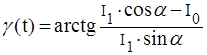 (1), где a=w0 t - текущий угол между вектором тока статора и действительной осью Ra. В момент времени t2 вектор тока статора I1 займет положение OC, при котором векторы тока ротора I2 и потокосцепления ротора Y2 взаимно перпендикулярны, то есть g(t2 )=g.
(1), где a=w0 t - текущий угол между вектором тока статора и действительной осью Ra. В момент времени t2 вектор тока статора I1 займет положение OC, при котором векторы тока ротора I2 и потокосцепления ротора Y2 взаимно перпендикулярны, то есть g(t2 )=g.
Из рис. видно, что при g(t2 )=g выполняется соотношение:
I1 ×sinb=BC=AC+AB.
Величина отрезка AB определяется из подобия треугольников OBA и OED:  .
.
Так как AC = i2 (из векторной диаграммы), то
BC = I2 +  =
=  .
.
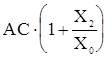
Величина отрезка AC определяется из треугольника АFC:
![]() (2).
(2).
Таким образом, изменяющийся во времени угол g(t) будет равен углу между векторами тока намагничивания I0 и потокосцепления ротора Y2 асинхронного двигателя в момент выполнения равенства:
 . (3)
. (3)
Из векторной диаграммы (рис. ) видно, что искомый угол b между векторами тока статора I1 и потокосцепления ротора Y2 будет определяться как:
b = a(t2 ) + g(t2) = w0 ×t + g
2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
2.1 Наименование и область применения
Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем.
Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом.
2.2 Основание для проведения разработки
Проектируемая АСУ предназначена для управления асинхронным двигателем и осуществляет регулирование и измерение его основных параметров.
Автоматизированная система управления асинхронным двигателем может применяться для замены уже установленных систем управления устаревших образцов. При этом требуются минимальные капитальные затраты, но достигается значительное улучшение работы объекта управления.
2.3 Цель и назначение разработки
Целью создания АСУ является повышение технико-экономических показателей работы асинхронного двигателя. При этом эффективность управления достигается за счет применения современных методов управления технологическими процессами, а также использования новейших технических средств автоматизации.
2.4 Требования к системе
Распределение функций АСУ должно быть выполнено с целью достижения высокой устойчивости системы к отказам ее структурных компонентов и сочетаться с централизацией функций принятия решений по управлению технологическим процессом.
В целях повышения надежности функционирования АСУ должно быть предусмотрено резервирование ее структурных компонентов.
АСУ должна быть реализована в виде структуры, состоящей из определенного количества функциональных подсистем и отражающей принципы декомпозиции АСУ как по технологическому признаку, так и в соответствии с иерархией реализуемых задач управления.
2.4.1 Требования к комплексу решаемых задач
Для реализации поставленных задач система должна обеспечивать:
· пуск и останов двигателя;
· изменение частоты вращения вала двигателя;
· регистрацию (вывод на экран и печать) основных параметров двигателя (информация должна представляться на экране оператору в удобной для чтения форме: в виде таблиц и графиков);
· экстренный останов двигателя в случае поступления аварийного сигнала от датчиков (при отклонении параметров от допустимых технологических пределов);
· резервирование измерительных каналов.
2.4.2 Нижний уровень
Нижний уровень должен решать задачи сбора информации с датчиков технологических параметров, контроль исправности датчиков и линий связи, контроль параметров и сигнализация об отклонениях их за допустимые технологические пределы, а также передает их в АСУ верхнего уровня.
2.4.3 Верхний уровень