Реферат: Режимы работы асинхронных двигателей
Частота тока и ЭДС, наводимая в проводниках обмотки ротора, зависят от частоты тока и ЭДС обмотки статора и от скольжения:
f2 - f1s; Е'2 - E1s,
где Е1— ЭДС обмотки статора; Е'2 — ЭДС обмотки ротора, приведенная к числу витков обмотки статора.
Рис. 2.1. Механическая характеристика асинхронной машины

Теоретически асинхронная машина может работать в диапазоне изменения скольжения s = -∞...+∞ (рис. 2.1), но не при s = 0, так как в этом случае п - пс и проводники обмотки ротора неподвижны относительно поля статора, ЭДС и ток в обмотке равны нулю и момент отсутствует. В зависимости от практически возможных скольжений различают несколько режимов работы асинхронных машин (рис. 2.1): генераторный режим при s < 0, двигательный при 0 < s < 1, трансформаторный при s = 1 и тормозной при s > 1. В генераторном режиме ротор машины вращается в ту же сторону, что и поле статора, но с большей частотой. В двигательном — направления вращения поля статора и ротора совпадают, но ротор вращается медленнее поля статора: п = пс(1 - s). В трансформаторном режиме ротор машины неподвижен и обмотки ротора и статора не перемещаются относительно друг друга. Асинхронная машина в таком режиме представляет собой трансформатор и отличается от него расположением первичной и вторичной обмоток (обмотки статора и ротора) и наличием воздушного зазора в магнитопроводе. В тормозном режиме ротор вращается, но направление его вращения противоположно направлению поля статора и машина создает момент, противоположный моменту, действующему на вал. Подавляющее большинство асинхронных машин используют в качестве двигателей, и лишь очень небольшое количество — в генераторном и трансформаторном режимах, в тормозном режиме — кратковременно.
Для оценки механической характеристики асинхронного двигателя моменты, развиваемые двигателем при различных скольжениях, обычно выражают не в абсолютных, а в относительных единицах, т. е. указывают кратность по отношению к номинальному моменту: М* = M/Мном. Зависимость М* = f(s) асинхронного двигателя (рис. 2.2) имеет несколько характерных точек, соответствующих пусковому М*п, минимальному М*min, максимальному М*max и номинальному М*ном моментам.
Пусковой момент М*п характеризует начальный момент, развиваемый двигателем непосредственно при включении его в сеть при неподвижном роторе (s - 1). После трогания двигателя с места его момент несколько уменьшается по сравнению с пусковым (см. рис. 2.2). Обычно М*min на 10...15 % меньше М*п. Большинство двигателей проектируют так, чтобы их М*min был больше М*ном , так как они могут достигнуть номинальной скорости лишь при условии, что момент сопротивления, приложенный к валу, будет меньше, чем М*min .
Максимальный момент М*max характеризует перегрузочную способность двигателя. Если момент сопротивления превышает М*max, двигатель останавливается. Поэтому М*max называют также критическим, а скольжение, при котором момент достигает максимума, — критическим скольжением sкp. Обычно sкр не превышает 0,1...0,15; в двигателях с повышенным скольжением (крановых, металлургических и т. п.) sкp может быть значительно большим.
В диапазоне 0 < s < sкр характеристика М - f(s) имеет устойчивый характер. Она является рабочей частью механической характеристики двигателя. При скольжениях s > sкр двигатель в нормальных условиях работать не может. Эта часть характеристики определяет пусковые свойства двигателя от момента пуска до выхода на рабочую часть характеристики.
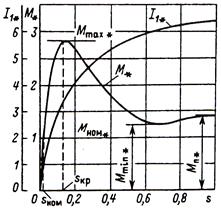
Рис. 2.2. Зависимость тока и момента асинхронного двигателя от скольжения
Трансформаторный режим, т. е. режим, когда обмотка статора подключена к сети, а ротор неподвижен, называют также режимом короткого замыкания двигателя. При s = 1 ток двигателя в несколько раз превышает номинальный, а охлаждение много хуже, чем при номинальном режиме. Поэтому в режиме короткого замыкания асинхронный двигатель, не рассчитанный для работы при скольжениях, близких к единице, может находиться лишь в течение нескольких секунд.
Режим короткого замыкания возникает при каждом пуске двигателя, однако в этом случае он кратковременен. Несколько пусков двигателя с короткозамкнутым ротором подряд или через короткие промежутки времени могут привести к превышению допустимой температуры его обмоток и к выходу двигателя из строя.
3. Аналитическое и графическое определение режимов работы асинхронной машины
Электромеханическое преобразование энергии может происходить в асинхронной машине в следующих трех режимах:
в режиме двигателя 0 < s < l, Ω1 > Ω > 0;
в режиме генератора s < 0, Ω > Ω1;
в режиме тормоза s > 1, Ω < 0.
Кроме того, важны еще два характерных режима работы, в которых электромеханическое преобразование энергии не происходит: режим идеального холостого хода (s = 0, Ω = Ω1) и режим короткого замыкания (s = 1, Ω = 0).
В режиме двигателя (область Д на рис. 3.2) под воздействием электромагнитного момента Μ > 0, направленного в сторону поля, ротор машины вращается в сторону поля со скоростью, меньшей, чем скорость поля (Ω1 > Ω > 0, 0 < s < 1). В этом режиме
Ρэм = ΜΩ1 = ![]() > 0; Ρмех = ΜΩ = Ρэ2
> 0; Ρмех = ΜΩ = Ρэ2 ![]() > 0.
> 0.
Электрическая мощность Р1 = Рэм + Рм + Рэ1 > 0 преобразуется в механическую мощность Р2 = Рмех — Ρд — ΡΊ > 0, передаваемую через вал приводимой в движение машины.
Энергетические процессы в режиме двигателя иллюстрируются рис. 3.1, а, на котором направление активной составляющей тока ротора i2а совпадает с индуктированной в роторе ЭДС. Направление электромагнитного момента Μ определяется электромагнитной силой Bmi2a, действующей на ток i2a .
Полезная механическая мощность Р2 оказывается меньше потребляемой из сети мощности на потери ΣΡ:
Ρ2 = Ρ1-ΣΡ = Ρ1 -(Ρэ1 + Ρм+Ρэ2 + Ρд + Ρт),
И КПД двигателя выражается формулой:
η = ![]() = 1-
= 1-![]() = f(s)
= f(s)
В режиме генератора (область Г на рис. 3.2) под воздействием внешнего момента Мв > 0, направленного в сторону поля (рис. 3.1, б), ротор машины вращается со скоростью, превышающей скорость поля (Ω > Ω1, s < 0). В этом режиме в связи с изменением направления вращения поля (Ω^) относительно ротора активная составляющая тока ротора г'2а изменяет свое направление иа обратное (по сравнению с двигательным режимом). Поэтому электромагнитный момент Μ = Bmi2a, уравновешивающий внешний момент, направлен против поля и считается отрицательным (М < 0), мощности Рэ„ и Ртх также отрицательны:
Ρэм = ΜΩ1 = ![]() < 0; Ρмех = ΜΩ = Ρэ2
< 0; Ρмех = ΜΩ = Ρэ2 ![]() < 0.
< 0.