Реферат: Системы адаптивного управления роботами
1 – задать координаты точек позиционирования;
2 – перенести захватное устройство в положение захвата детали;
3 – перейти в положение захвата детали;
4 – включить пневматическое захватное устройство;
5 – перейти в исходное положение;
6 – перенести захватное устройство с деталью к таре;
7 – выключить пневматическое захватное устройство;
8 – повторить с метки 2.
Однако успешная перегрузка деталей с конвейера в тару будет продолжаться, пока не возникнет пусть даже незначительное отклонение положения детали от заданного в программе. Причиной отклонения может быть неравномерность скорости движения конвейера или раскачивание детали. В этом случае деталь будет захвачена роботом неверно или не будет захвачена вовсе. Естественно, робот не заметит подобного сбоя и будет продолжать совершать ошибочные действия, пока не вмешается человек-оператор и не выключит его.
Сбои из-за неравномерности движения конвейера можно исключить, сохранив программный режим работы. Для этого достаточно оснастить конвейер датчиком, срабатывающим в момент прохождения крюком конвейера заданного положения захвата, установив в управляющей программе между метками 2 и 3 условный оператор, разрешающий переход на метку 3 только после получения сигнала датчика.
Однако введение в систему управления датчика положения крюка конвейера не исключает сбоев от раскачивания деталей. Кроме того, программное управление оказывается бессильным, если детали неверно подвешены на конвейере. Очевидно, что решить данную задачу под силу только адаптивной системе управления. Для этого существующий робототехнический модуль необходимо оснастить не только датчиком положения крюка, а еще и средствами для распознавания деталей и измерения координат точки для их захвата. В этом случае рассмотренный выше алгоритм действий робота модифицируется в такую последовательность:
1 – задать координаты точек позиционирования: исходной и тары;
2 – перенести захватное устройство в исходное положение;
3 – по сигналу датчика положения крюка произвести распознавание детали, измерить координаты точки захвата и ориентацию детали;
4 – перейти в положение захвата, ориентировать захватное устройство по отношению к оси детали;
5 – включить пневматическое захватное устройство;
6 – перейти в исходное положение;
7 – перенести захватное устройство с деталью к таре;
8 – выключить пневматическое захватное устройство;
9 – повторить с метки 2.
Таким образом, дополнительные устройства, введенные в систему управления, и модификация исходной программы позволяют обслуживать конвейер, перемещающийся с априори неизвестной скоростью и произвольным, в определенных пределах, расположением деталей.
Структура адаптивных систем управления
Анализируя функции программной и адаптивной систем управления роботом, решающим рассматриваемую задачу, можно заметить, что они отличаются только устройствами, воспринимающими информацию о внешней среде. Эти устройства обрабатывают эту информацию и выбирают последовательность обхода уже имеющихся в программе робота точек позиционирования (рис.1).
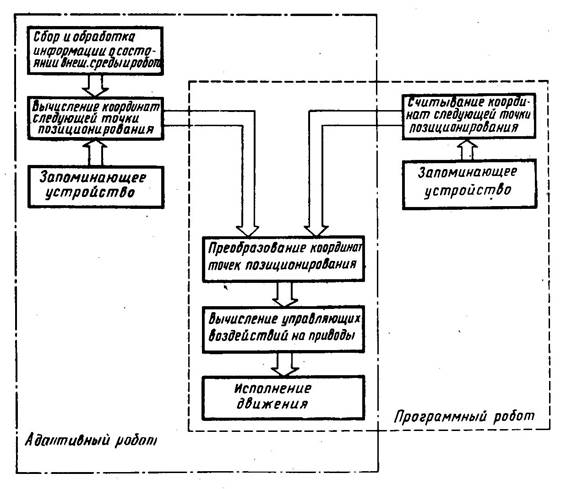
Рис.1. Схемы управления адаптивным и программным
роботом.
Компоненты адаптивной и программной среды, отвечающие за исполнение выбранной последовательности обхода заданных точек, оказываются сходными.
Таким образом, основное свойство адаптивных систем – реализация цели управления в условиях недетерминированной внешней среды и дрейфа параметров робота – отражается в структуре двумя новыми элементами: информационной системой, а также устройством для вычисления координат целевых точек и последовательности их обхода, использующим информацию об изменениях, произошедших во внешней среде и компонентах робота.
Функции управления адаптивным роботом выполняет вычислительное устройство, уровень сложности которого определяется уровнем адаптации робота. В простейшем случае это может быть микропроцессор или микроЭВМ, для сложных адаптивных робототехнических систем вычислительное устройство может представлять собой мультимикропроцессорную сеть.
Для современных адаптивных робототехнических систем характерно совмещение в вычислительном устройстве функции адаптации к изменениям внешней среды и параметров приводов робота с широким набором аппаратурных и программных средств самодиагностики и устранения мелких неисправностей в самой системе управления.
На рис.2 показан один из возможных вариантов структуры мультимикропроцессорного устройства, управления адаптивным роботом. Устройство включает в себя однотипные микропроцессоры (МП), объединенные общей магистралью и обменивающиеся информацией с общим оперативным запоминающим устройством (ОЗУ). Каждый из микропроцессоров имеет свое собственное локальное запоминающее устройство (ЛЗУ) для хранения команд и данных и устройство ввода-вывода информации (УВВ) для связи с периферийной аппаратурой, работой которой управляет данный микропроцессор. Связь между микропроцессором, его памятью и устройством ввода-вывода осуществляется с помощью локальной магистрали.
Несмотря на то, что микропроцессорные модули имеют одинаковую структуру, они выполняют различные функции. Так, один из них осуществляет сбор и обработку внешней информации, другой обеспечивает связь с терминалом и интерпретирует команды оператора, третий вычисляет управляющие воздействия и контролирует работу приводов робота, а четвертый отвечает за связь с внешним технологическим оборудованием и верхним уровнем управления автоматической линией или участком.