Реферат: Системы адаптивного управления роботами
Рис.2. Структура мультимикропроцессорного устройства адаптивного управления роботом.
Особенностью данной структуры вычислительного устройства является возможность самодиагностики и саморемонта , которая реализуется с помощью блока контроля магистрали (БКМ). Функции самодиагностики и мелкого саморемонта относятся к одним из важнейших в современных системах управления адаптивным роботам, так как их выполнение обеспечивает безаварийную работу гибкого производственного модуля даже в условиях сбоев и частичного отказа аппаратуры.
Анализируя порядок прохождения сигналов по общей магистрали и их параметры, БКМ оценивает исправность отдельных микропроцессорных модулей и приемопередатчиков, связывающих микропроцессоры с общей магистралью. Если какой-либо микропроцессорный модуль вышел из строя, то наряду с сообщением о замеченной неисправности, передаваемым оператору на верхний уровень управления, блок контроля магистрали формирует команду на отключение аварийного модуля и передачу его функций работоспособным микропроцессорам. Если же вышел из строя только приемопередатчик микропроцессора, то по команде БКМ может измениться структура связей между микропроцессорами. Например, используя резервные каналы ввода-вывода, имеющие, как правило, меньшую пропускную способность, чем общая магистраль, можно осуществлять передачу информации между микропроцессорами, соединив их по принципу «каждый с каждым».
Конечно, саморемонт адаптивной системы является временной, вынужденной мерой, так как при этом несколько снижается производительность вычислительного устройства, однако живучесть робототехнического модуля оказывается очень высокой.
Программное обеспечение систем управления адаптивных роботов
Функции программного обеспечения адаптивного робота состоят в обслуживании внешних по отношению к системе управления объектов: человека-оператора, приводов робота, информационной системы, технологического оборудования и вычислительного устройства верхнего уровня управления (рис.3).
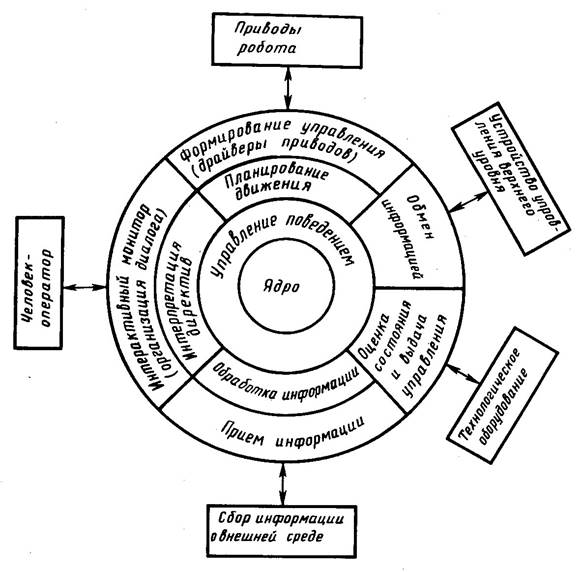
Рис.3. Структура программного обеспечения адаптивного
робота.
Система управления взаимодействует с человеком-оператором в режиме активного диалога, в процессе которого человек выполняет следующие действия:
- формирует рабочую программу, которая может быть представлена в виде набора данных, описывающих точки позиционирования захватного устройства робота и управляющие сигналы на технологическое оборудование, или в виде набора инструкций на проблемно-ориентированном языке;
- редактирует рабочую программу с помощью программы-редактора данных или редактора текста, поскольку, как было сказано выше, программа может представлять собой либо данные, либо инструкции;
- создает объектный и загрузочный модули рабочей программы, обеспечивает удаление старых файлов, включение новых, переименование и хранение программ в библиотеке;
- отлаживает рабочую программу, т.е. при поддержке программного обеспечения осуществляет ее пошаговое исполнение, анализирует результаты отладки и при удовлетворительном качестве программы дает команду на ее исполнение;
- реализует функции контроля исправности оборудования, в частности, проверяет каналы связи с технологическим оборудованием, калибрует измерительные системы робота и выполняет другие операции диагностирования.
Основные функции программного обеспечения
По отношению к исполнительному устройству робота – манипулятору – функции программного обеспечения широки и многообразны. В зависимости от уровня интеллекта робота они могут включать: подробный анализ задания; разбиение его на подзадачи и элементарные действия; планирование движения инструмента или захватного устройства для реализации этих действий; определение последовательности точек позиционирования, обход которых позволит воспроизвести желаемую траекторию и, наконец, преобразование координат точек позиционирования инструмента в требуемые положения сочленений манипулятора и формирование команд управления приводами.
Важной с точки зрения организации взаимодействия гибких производственных модулей, составляющих линии и участки, является поддержка программным обеспечением робота информационного обмена с верхним по отношению к нему уровнем управления.
Конечно, существуют гибкие производственные модули с адаптивными роботами, работающие полностью автономно. Однако в этом случае на плечи системы управления робота и ее программного обеспечения ложатся функции координации действий всех компонент ГПМ. Кроме того, при появлении каких-либо неполадок или сбоев в работе невозможно послать запрос о помощи вышестоящей системе управления.
С другой стороны, если существует канал связи адаптивного робота с ЭВМ верхнего уровня и процесс обмена поддерживается с двух сторон программным обеспечением, появляется уникальная возможность создания иерархии уровней управления с четким разделением задач каждого и сопутствующей унификацией программного обеспечения и языков программирования каждого.
В этом случае ЭВМ, управляющая гибким производственным модулем, который, как правило, является верхним уровнем по отношению к роботу, берет на себя координацию действий оборудования ГПМ, устранение возможности аварийных ситуаций, например столкновения манипулятора с подвижными участками других устройств или столкновения двух манипуляторов, оперирующих в одной зоне, диагностирование оборудования ГПМ и ряд других функций, осуществляемых программным обеспечением адаптивного робота при автономной работе ГПМ под его управлением.
При обслуживании информационных систем функции программного обеспечения адаптивного робота зависят уже от уровня интеллекта его сенсоров. Если обработка информации о внешней среде осуществляется самой сенсорной системой, то программное обеспечение робота должно организовать лишь прием данных. В противном случае в его функции включается также обработка и выделение информации, пригодной для целей управления, а также определение адресата из числа программных модулей, ответственных за управление, которому эта сенсорная информация предназначена.
Кроме перечисленных функций программное обеспечение должно решать общесистемные задачи по обработке сигналов прерываний, по управлению вводом-выводом информации, распределению вычислительных ресурсов и т.д.
Оценивая изложенные выше основные функции программного обеспечения адаптивного робота, можно заметить их сходство с функциями универсальных операционных систем реального времени. Действительно, если сравнивать основные компоненты универсальных операционных систем и систем программирования адаптивных роботов, то прослеживается их аналогия.
Система программирования адаптивного робота:
- команды оператора;
- рабочее задание;
- проблемно-ориентированный язык программирования робота;
- обслуживание внешних устройств;
- обеспечение обмена с верхним уровнем управления.
Операционная система реального времени:
- команды монитора;
- файловая система;
- языки программирования;
- управление вводом-выводом;
- поддержка сетевого обмена.
Такая аналогия позволяет при проектировании систем программирования роботов использовать опыт, накопленный не только в области теории универсальных операционных систем, но и пользоваться самими операционными системами.
Заключение
Применение в гибких производственных системах адаптивных роботов приводит к значительному повышению качества выпускаемой продукции за счет применения новых направлений в автоматизации технологических процессов, в данном случае микропроцессорных и сенсорных технологий. Применение ЭВМ для контроля процесса и самодиагностики существенно уменьшает временные затраты на наладку и обслуживание ГПМ, сводя до минимума роль «человеческого фактора» в дефектах конкретных операций и ошибках программирования робота.
Список использованной литературы
1. Основы робототехники / Под ред. Е.П. Попова и Г.В. Письменного. М., 1990
2. Системы очувствления и адаптивные промышленные роботы / Под ред. Е.П. Попова и В.В. Клюева. М., 1985
3. Управляющие системы промышленных роботов / Под ред. И.М. Макарова и В.А. Чиганова. М., 1984