Реферат: Системы диагностики ПК
внешний носитель данных — регистр микрокоманд (РгМк) (рис. 15,а);
внешний носитель данных — оперативная память (ОП)—регистр микрокоманд (рис. 15,б);
внешний носитель данных — загружаемая управляющая память (ЗУП) микрокоманд—регистр микрокоманд (рис. 15, в).
В качестве устройства ввода микродиагностики чаще всего используются так называемые пультовые накопите» ли на гибких магнитных дисках или кассетных магнитных лентах.
Первый вариант загрузки скорее имитирует «быстрый» тактовый режим, чем выполнение микрокоманд с реальным быстродействием, так как накопление и выполнение микрокоманд определяются скоростью ввода данных с внешнего носителя. Микрокоманды выполняются по мере их поступления из внешнего носителя данных.
Второй вариант загрузки предусматривает возможность хранения и выполнения микрокоманд из основной памяти ЭВМ, т. е. совместимость форматов оперативной" и управляющей памятей. В этом варианте должен быть предусмотрен специальный вход в регистр микрокоманд из оперативной памяти.
Третий вариант загрузки обеспечивает загрузку в управляющую память микродиагностики определенного объема и выполнение ее. с реальным быстродействием. По окончании выполнения загружается следующая порция микродиагностики.
Существуют и другие варианты загрузки и выполнения, несущественно отличающиеся от приведенных выше. Возможно также использование разных вариантов загрузки и выполнения на разных этапах диагностирования ЭВМ.
Для средних и больших ЭВМ с хранением микродиагностики на внешних носителях данных, для опроса состояния и сравнения его с эталоном используется дополнительная аппаратура. В последнее время эти функции все больше передаются так называемым сервисным процессорам, имеющим универсальные возможности по» управлению пультовыми накопителями, опросу состояния ЭВМ, сравнению результатов с эталонными и индикации списка возможных неисправностей. При микродиагностировании с использованием дополнительной аппаратуры средства тестового диагностирования выполняют специальные диагностические операции, такие как запуск микрокоманд, опрос состояния, сравнение с эталоном и сообщение о неисправности. Процедура выполнения микродиагностики обычно такова: средства тестового диагностирования загружают в ЭВМ микрокоманды и дают приказ на их выполнение; ЭВМ отрабатывает микрокоманды, после чего средства тестового диагностирования производят опрос состояния, сравнение с эталоном и сообщение о неисправности. Обычно при. микродиагностике тестовые наборы являются частью микрокоманды (поле констант). Глубина поиска дефекта при микродиагностике зависит от числя схем, для которых, предусмотрена возможность непосредственного опроса состояния. В связи с этим в современных ЭВМ имеется возможность непосредственного опроса состояния практически всех триггеров и регистров ЭВМ.
Регистр микрокоманд устанавливается средствами тестового диагностирования с помощью диагностической операции «Загрузка РгМк».
Состояние регистров поступает в СТД, где выполняется диагностическая операция сравнения с эталоном.
При несовпадении результата с эталоном происходит останов с индикацией номера останова.
5. МЕТОД ЭТАЛОННЫХ СОСТОЯНИЙ
Метод эталонных состояний характеризуется тем, что объектом элементарных проверок является аппаратура, используемая на одном или нескольких тактах выполнения рабочего алгоритма функционирования, реализуемого в режиме диагностирования.
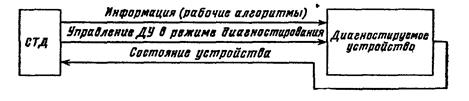
Рис. 16. Обобщенна» схема системы диагностирования, реализующей метод эталонных состояний
В качестве результата элементарной проверки используется состояние аппаратурных средств диагностируемого устройства.
Процесс диагностирования по методу эталонных состояний, заключается в потактовом выполнении рабочих алгоритмов ДУ, опросе состояния ДУ на каждом такте, сравнении состояния ДУ с эталонным и ветвлении в зависимости от исхода сравнения к выполнению следующего такта или сообщению о неисправности.
При реализации метода эталонных состояний средства тестового диагностирования представляют собой совокупность аппаратурных и программных средств.
Обобщенная схема системы диагностирования, реализующей метод эталонных состояний, приведена на рис. 16.
При представлении алгоритмов операций ЭВМ в виде графов каждому пути i из множества путей на графе можно поставить в соответствие последовательность состояний ЭВМ на каждом такте: Si0 , Si1 ,..., Sil , ... ,Sin ,
|
|
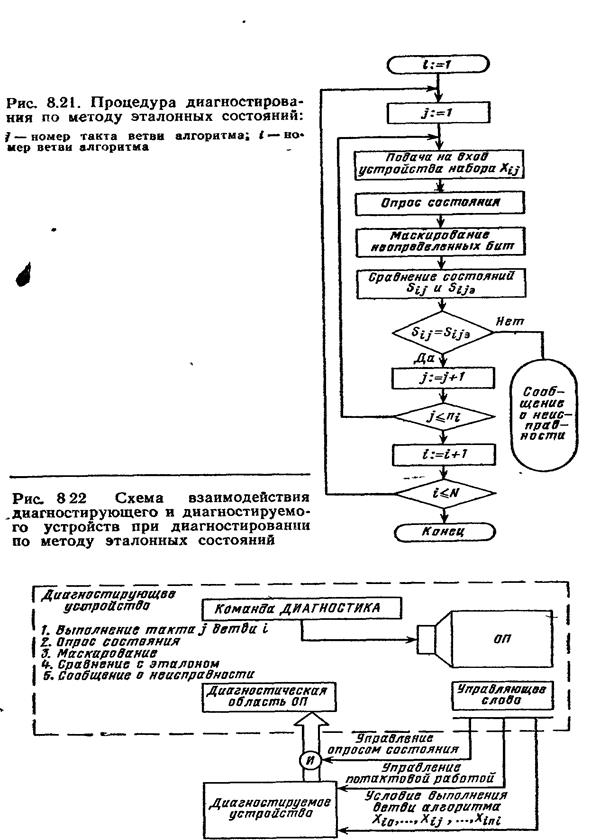
где п—число вершин граф-схемы алгоритма, соответствующее числу тактов выполнения операции с конкретными условиями. Эталонной последовательностью состояний считается последовательность состояний Sil , l=0, 1,...,п, имеющих место при отсутствии ошибок.
Проверка выполняется путем сравнения реального состояния ЭВМ Sil на l-м такте i-го пути с эталонным Sэ il .
Несовпадение Sil и Sэ il является признаком неисправности.
Процедура диагностирования по методу эталонных состояний приведена на рис. 17.
Для реализации метода эталонных состояний средства тестового диагностирования должны иметь:
средства управления потактовой работой ЭВМ;