Реферат: Структуры типовых регуляторов
Содержание
Введение
Структуры типовых регуляторов
1. П-регулятор
2. ПД-регулятор
3. ПИ-регулятор
4. ПИД-регулятор
Заключение
Список литературы
Введение
Каждый контур регулирования обобщенно можно рассматривать как систему, состоящую непосредственно из самого объекта регулирования и регулятора, который через исполнительное устройство может влиять на регулируемый параметр объекта.
Каждый регулятор можно охарактеризовать:
– законом, на основе которого осуществляется регулирование;
– типами входных сигналов (первичных датчиков);
– типами выходных сигналов управления (исполнительных устройств);
– способом задания установки регулирования;
– дополнительными возможностями (дополнительные функции, дополнительные входы/выходы).
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональные, пропорционально-дифференциальные, пропорционально-интегральные и пропорционально-интегрально-дифференциальные регуляторы — сокращенно И, П, ПД, ПИ и ПИД-регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы.
Рассмотрим структурные схемы автоматических регуляторов с типовыми сервоприводами, воспроизводящие основные законы регулирования методом параллельной и последовательной коррекции.
Структуры типовых регуляторов
1. П -регулятор
Функциональная схема П-регулятора с сервоприводом с пропорциональной или интегральной скоростью перемещения изображена на рис. 1.
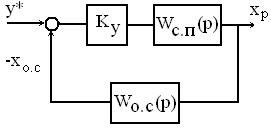
Рис. 1. Структурная схема регулятора, состоящего из усилителя, сервопривода и отрицательной обратной связью
Отрицательная обратная связь в регуляторе осуществляется по положению регулирующего органа путем подачи на вход устройства обратной связи сигнала с выхода сервопривода. Конструктивно обратная связь осуществляется с помощью механической, электрической или другой передачи в зависимости от типов сервопривода и командно-усилительного устройства. Характеристики П-регуляторов (операторная и частотная) имеют вид:
Wр (р) = 1 ⁄ Wо.с (р); Wр (iщ) = 1 ⁄ Wо.с (iщ) (1.1)
Для того, чтобы приведенное выше выражение было тождественно уравнению пропорционального регулятора xр = Kр y*, необходимо выполнить условие:
Wо.с (р) = Xо.с (р) ⁄ xр (р) = 1 ⁄ Kр (1.2)
В соответствии с этим условием обратная связь должна выполняться на базе безинерционного усилительного звена. Коэффициент усиления звена обратной связи kо.с = д = 1 ⁄ Kр называют степенью жесткой (т. е. неизменной во времени) обратной связи.
--> ЧИТАТЬ ПОЛНОСТЬЮ <--