Реферат: Техническое использование СЭУ
— работу ГД вне зон критической частоты вращения, предотвращая перегрузки, а в случае превышения допустимого времени работы в этих зонах осуществляя сигнализацию;
— аварийную остановку ГД из рулевой рубки с помощью устройств, питаемых от независимого источника энергии (в некоторых системах предусматривается контроль исправности электрически» цепей этих устройств);
— резервирование основных исполнительных цепей;
— выполнение последней поданной команды, прерывая исполнение предыдущей;
— сохранение заданного режима работы ГД (консерватизм системы ДАУ) при исчезновении питания, обрывах в цепях датчиков-частоты вращения ГД, команд и обратной связи по уставке регулятора скорости;
— автоматический переход на резервное питание при прекращении основного;
— повторные автоматические попытки пуска (в пределах трех попыток);
— ограничение длительности каждой попытки пуска и общего времени всех попыток;
— ограничение максимальной пусковой топливоподачи в зависимости от условий работы ГД и выбранной программы управления;
— автоматическое введение установок частоты вращения начала контрпуска при реверсе ГД в зависимости от инерции судна (по частоте вращения гребного винта, работающего в турбинном режиме);
— ручную коррекцию из рулевой рубки частоты вращения вала ГД, если рукоятка машинного телеграфа имеет фиксированные положения, соответствующие заданным командам;
— защиту ГД с его остановкой или снижением нагрузки при предельных отклонениях критических параметров: давлений смазочного масла и охлаждающих сред ГД;
— снятие защиты ГД в аварийных ситуациях;
— развитую командно-исполнительную и аварийно-предупредительную сигнализацию в рулевой рубке и машинном отделении.
Системы ДАУ реверсивных ГД с прямой передачей мощности на. ВФШ позволяют воздействием на один орган управления (рукоятку машинного телеграфа рулевой рубки судна) автоматически производить операции по пуску, остановке, реверсированию и изменению частоты вращения двигателя.
Ряд дополнительных органов позволяет переходить с дистанционного управления на ручное и обратно, переключать программы, управления, производить аварийную остановку ГД.
Независимо от рода применяемой рабочей среды структурно такую систему (рис. 2) можно разделить на три основных канала: управления реверсом, пуском и частотой вращения.
Воздействием на соответствующие органы пульта управления и; сигнализации ПУС в зависимости от условий работы судна выбирается требуемая программа управления ГД. Сигналы датчика команд ДК, приводимого в действие с помощью рукоятки машинного телеграфа МТ, непосредственно поступают в каналы управления реверсом и частотой вращения (топливоподачей). По сигналам дискретных (позиционных) датчиков ДПД1 и ДПД2 осуществляется контроль положения органов реверса и тяги ТНВД. Датчик частоты вращения ДЧВ вырабатывает сигнал о частоте вращения коленчатого вала ГД, поступающий в канал управления пуском. В системах без навешенного на двигатель всережимного регулятора этот сигнал поступает также в канал управления частотой вращения. В зависимости от свойств пускореверсивной системы данного двигателя производится выбор определенного алгоритма функционирования и настройка системы ДАУ. Этот алгоритм реализуется подачей команд в определенной последовательности и на определенном уровне параметров как в каналы системы ДАУ, так и на органы штатной системы управления ГД.
Особенностями пусковой и реверсивной системы двигатели определяется последовательность прохождения сигналов на клапан управления пуском КУП, освобождение и движение тяги ТНВД.
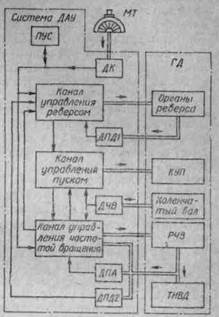
Рис. 2. Структурная схема ДАУ реверсивного дизеля
В большинстве известных систем ДАУ вывод ГД на заданную частоту вращения производится через всережимный регулятор, включенный по всережимной схеме. Этот же регулятор затем стабилизирует заданную частоту вращения при изменении внешних условий плавания. Однако в ряде электронно-пневматических систем ДАУ функции регулятора выполняют электрические устройства. Логическая часть устройств с обратной связью от ДЧВ управляет исполнительным механизмом, который непосредственно воздействует на тягу ТНВД.
В современных системах ДАУ имеются устройства защиты ГД от перегрузки, работающие по принципу ограничения нагрузки по заданной либо истинной (фактической) частоте вращения вала. Эти устройства могут действовать как через навешенный на ГД регулятор, так и через электронный, встроенный в систему ДАУ. Предпочтительно применение устройств ограничения нагрузки по истинной частоте вращения вала двигателя. Тогда с ростом нагрузки по сигналам от аналоговых датчиков частоты вращения ДЧВ и положения ДПА тяги ТНВД происходит снижение уставки задания регулятора по закону заложенной ограничительной характеристики.
Литература
1. И.В. Вознизкий «Судовые двигатели внутреннего сгорания», М., Транспорт, 1979, 413 стр.
2. В.С. Онасенко «Автоматизация судовых энергетических установок», М., Транспорт, 1981,270 стр.
3. А.М. Манькова «Судовые пароэнергетические установки», М., Транспорт, 1989,237 стр.
4. А.П.Добровольский «Судовые холодильные машины и установки», Ленинград, Судостроение, 1969, 252 стр.