Реферат: Технологические средства автоматизации
Принцип работы ЦАП основан на том, что единице в каждом разряде входного кода ставится в соответствие некоторое напряжение, которое добавляется к выходному и имеет значение, пропорциональное весу разряда. Таким образом, выходное напряжение пропорционально двоичному числу, определяемому входным кодом. Обычно, ЦАП поддерживает выходное напряжение на том же уровне до прихода команды записи. Это обеспечивается введением в ЦАП триггеров. Если запись в ЦАП разрешена, то триггеры устанавливаются в значения, соответствующие значениям разрядов входного кода. Если запись в ЦАП запрещена, то триггеры находятся в состоянии хранения и выходное напряжение ЦАП остаётся на том же уровне.
Обычно, ЦАП собирается на резисторной матрице, управляемой электронными ключами. Электронные ключи обеспечивают подключение резисторов матрицы к положительному или отрицательному потенциалу источника питания. Электронные ключи должны иметь малое сопротивление в открытом состоянии и очень большое сопротивление в закрытом. Это требование обеспечивается применением полевых МОП транзисторов с изолированным затвором.
Существует по крайней мере две схемы построения ЦАП. ЦАП с прецизионными резисторами имеет резисторы с сопротивлением, обратно пропорциональным весам разрядов входного кода. При этом каждый такой резистор подключён к соответствующему электронному ключу. Если в соответствующем разряде входного кода находится 1, ключ подключает резистор к положительному потенциалу источника питания, обеспечивая добавление к выходному напряжению АЦП напряжения, пропорционального весу данного разряда входного кода. Если в соответствующем разряде входного кода записан 0, то резистор отключается от положительного потенциала источника питания, не оказывая влияния на выходное напряжение ЦАП. Недостатком подобного ЦАП является то, что резисторы, входящие в его состав должны иметь очень высокую точность значения сопротивления, которое не должно изменяться при изменении температуры. Если это не так, то линейность преобразования ЦАП нарушается и может зависеть от температуры и других факторов.
Во втором типе ЦАП все резисторы имеют одинаковое сопротивление или разделены на две группы, сопротивления резисторов в каждой группе одинаково и отличается от другой группы в два раза. В цепи резисторов может использоваться то свойство, что два резистора с одинаковым сопротивлением, включённых параллельно, имеют общее сопротивление, равное половине сопротивления каждого. В настоящее время ЦАП первого типа практически не используются.
Вопрос 44.
Для схем с очень высокими напряжениями и очень большими токами созданы полупроводниковые приборы, называемые тиристорами. Один тиристор может работать при напряжениях до 4000 В и токах до 4000 А. В преобразователях тиристоры соединяют в каскады, рассчитанные на четверть миллиона вольт и более.
Тиристор состоит из двух транзисторов (npn и pnp), расположенных так, что коллектор pnp-части тиристора является базой npn-части, а коллектор npn-части – базой pnp-части. Если инжектировать небольшой ток в базу npn-части, то он создаст для эмиттера прямое смещение, и возникнет ток эмиттера. Этот ток, собранный коллектором npn-части, становится током базы pnp-части, который вызывает появление тока эмиттера этой части. Такой процесс будет повторяться до тех пор, пока вокруг общего коллекторного перехода не соберется заряд, достаточный для нейтрализации связанного заряда, и тогда напряжение на нем понизится до уровня ~0,7 В, соответствующего насыщению. Так происходит «включение» тиристора. «Выключается» же он при понижении тока ниже некоторого порогового уровня, называемого удерживающим током. Если сделать площадь эмиттера достаточно большой, то легко можно переключать колоссальные токи.
Тиристоры пропускают ток только в одном периоде переменного тока; лишь с изобретением симистора появился настоящий полупроводниковый переключатель переменного тока для регуляторов электродвигателей, регуляторов освещенности и других устройств. Симистор состоит из двух выполненных на одной кремниевой пластинке тиристоров, включенных параллельно, но противоположно. Один из тиристоров пропускает ток в одном полупериоде, а другой – в следующем. Для включения симистора предусматривается управляющий электрод. Чтобы выключить его, нужно прервать ток. Интересной особенностью симисторов является то, что они проводят ток любого направления и могут переключаться либо положительным, либо отрицательным управляющим сигналом
Вопрос 54.
Данный тип реле применяется для коммутация нагрузок в цепях постоянного и переменного тока; для работы в цепях переменного тока с постоянным смещением; в импульсных источники питания; в устройствах автоматического регулирования и управления.
Твердотельные оптоэлектронные реле с МОП - транзисторами на выходе являются альтернативой электромеханическим и полупроводниковым реле на основе тиристоров.
Прибор состоит из инфракрасного светодиода, оптически связанного с матрицей фотодиодов, которые работают в фотовольтрическом режиме и управляют выходным коммутирующим элементом, последний представляет собой пару МОП - транзисторов, соединенных истоками. При включении МОП - транзисторов в последовательную цепь получается линейный переключатель постоянного и переменного тока двунаправленного действия.
| Основные характеристики |
Вопрос 64.
На рис. 1,а показан виток провода abcd, вращающийся по часовой стрелке вокруг оси 00 в магнитном поле между северным (N) и южным (S) полюсами магнита. Направление мгновенной наведенной ЭДС показано стрелками ab и cd; величина и знак ЭДС для положений 1, 2, 3 и 4 приведены на графике рис. 1,б. Когда плоскость витка перпендикулярна полю (положения 1 и 3), ЭДС равна нулю; когда же плоскость витка параллельна полю (положения 2 и 4), ЭДС максимальна. Кроме того, направление ЭДС в боковых частях витка (скажем, ab), когда они проходят мимо северного полюса, противоположно ее направлению при прохождении мимо южного полюса. Поэтому ЭДС меняет знак через каждую половину оборота в точках 1 и 3, так что в витке генерируется переменная ЭДС и, стало быть, течет переменный ток. Если предусмотреть в конструкции токособирательные (контактные) кольца, то переменный ток пойдет во внешнюю цепь.




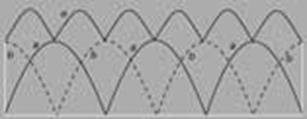
Конструкция. Генератор постоянного тока должен давать ток, который всегда течет в одном направлении. Для этого нужно переключать контакты внешней цепи в тот момент, когда ЭДС падает до нуля, прежде чем она начнет нарастать в другом направлении. Это делается с помощью коллектора, схематически изображенного на рис. 1,в. В показанном простейшем случае он представляет собой кольцо, разрезанное на две части по диаметру. Один конец витка присоединен к одному из полуколец, другой – к другому. Щетки расположены так, что они перекрывают зазоры между полукольцами, когда плоскость витка перпендикулярна магнитному полю (в положениях 1 и 3) и ЭДС равна нулю. Как явствует из рисунка, каждый раз, когда ЭДС меняет знак, переключаются концы внешней цепи, так что ток в ней течет всегда в одном направлении (рис. 1,г). Если к витку, показанному на рис. 1,в, добавить еще один, перпендикулярный ему, то его ЭДС будет соответствовать кривой bb, сдвинутой относительно первоначальной на 90 (рис. 2). Полная ЭДС будет соответствовать сумме двух кривых, т.е. значительно более гладкой кривой e. На практике используется большое число витков и коллекторных сегментов (рис. 3), так что пульсации ЭДС незаметны.

Вопрос 74.
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления. А. у. широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления.
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
САУ классифицируются в основном по цели управления, типу контура управления и способу передачи сигналов. Первоначально перед САУ ставились задачи поддержания определённых законов изменения во времени управляемых величин. В этом классе систем различают системы автоматического регулирования (CAP), в задачу которых входит сохранение постоянными значения управляемой величины; системы программного управления, где управляемая величина изменяется по заданной программе; следящие системы, для которых программа управления заранее неизвестна. В дальнейшем цель управления стала связываться непосредственно с определёнными комплексными показателями качества, характеризующими систему (её производительность, точность воспроизведения и т.п.); к показателю качества могут предъявляться требования достижения им предельных (наибольших или наименьших) значений, для чего были разработаны адаптивные, или самоприспосабливающиеся системы. Последние различаются по способу управления: в самонастраивающихся системах меняются параметры устройства управления, пока не будут достигнуты оптимальные или близкие к оптимальным значения управляемых величин; в самоорганизующихся системах с той же целью может меняться и её структура. Наиболее широки, в принципе, возможности самообучающихся систем, улучшающих алгоритмы своего функционирования на основе анализа опыта управления. Отыскание оптимального режима в адаптивных САУ может осуществляться как с помощью автоматического поиска, так и беспоисковым образом.
Способ компенсации возмущений связан с типом контура управления системы. В разомкнутых САУ на УУ не поступают сигналы, несущие информацию о текущем состоянии управляемого объекта, либо в них измеряются и компенсируются главные из возмущений, либо управление ведётся по жёсткой программе, без анализа каких-либо факторов в процессе работы. Основной тип САУ — замкнутые, в которых осуществляется регулирование по отклонению, а цепь прохождения сигналов образует замкнутый контур, включающий объект управления и УУ; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь, вне зависимости от причин, вызвавших эти отклонения. Объединение принципов управления по отклонению и по возмущению приводит к комбинированным системам. Часто, помимо основного контура управления, замыкаемого главной обратной связью, в САУ имеются вспомогательные контуры (многоконтурные системы) для стабилизации и коррекции динамических свойств. Одновременное управление несколькими величинами, влияющими друг на друга, осуществляется в системах многосвязного управления или регулирования.
По форме представления сигналов различают дискретные и непрерывные САУ. В первых сигналы, по крайней мере в одной точке цепи прохождения, квантуются по времени, либо по уровню, либо как по уровню, так и по времени.
Простейший пример САУ — система прямого регулирования частоты вращения двигателя (рис. 1).
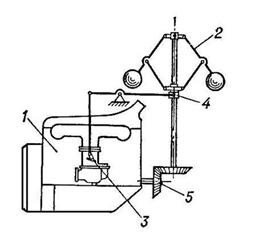
Рис. 1 Автоматическое управление
Цель управления — поддержание постоянной частоты вращения маховика, управляемый объект — двигатель 1; управляющее воздействие — положение регулирующей заслонки дросселя 3; УУ — центробежный регулятор 2, муфта 4 которого смещается под действием центробежных сил при отклонении от заданного значения частоты вращения вала 5, жестко связанного с маховиком. При смещении муфты изменяется положение заслонки дросселя. Структурная схема рассмотренного примера (рис. 2) типична для многих САУ вне зависимости от их физической природы. Описанная система представляет собой замкнутую одноконтурную непрерывную систему автоматического регулирования механического действия, допускающую линеаризацию при исследовании.
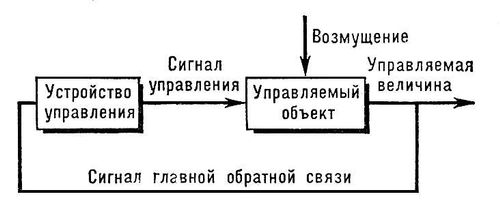
Рис. 2 Автоматическое управление
Промышленность выпускает универсальные регуляторы, в том числе с воздействием по производной, по интегралу, экстремальные регуляторы, для управления различными объектами. Специализированные САУ широко применяются в различных областях техники, например: следящая система управления копировально-фрезерным станком по жёсткому копиру; САУ металлорежущих станков с программным управлением от магнитной ленты, перфоленты или перфокарты (преимущества такого управления заключаются в относительной универсальности, лёгкости перестройки программы и высокой точности обработки деталей); система программного управления реверсивным прокатным станом, включающая в свой контур управляющую вычислительную машину. В относительно медленных технологических процессах в химической и нефтяной промышленности распространены многосвязные САУ, осуществляющие регулирование большого количества связанных величин; так, при перегонке нефти информация о температуре, давлении, расходе и составе нефтепродуктов, получаемая от нескольких сотен датчиков, используется для формирования сигналов управления десятками различных регуляторов. САУ играют важную роль в авиации и космонавтике, например автопилот представляет собой САУ связанного регулирования, а иногда и самонастраивающуюся систему. В военной технике применяются высокоточные следящие системы, часто включающие вычислительные устройства (например, система углового сопровождения радиолокационной станции). При анализе многих физиологических процессов в живом организме, таких как кровообращение, регуляция температуры тела у теплокровных животных, двигательные операции, обнаруживаются характерные черты САУ.
Вопрос 84.
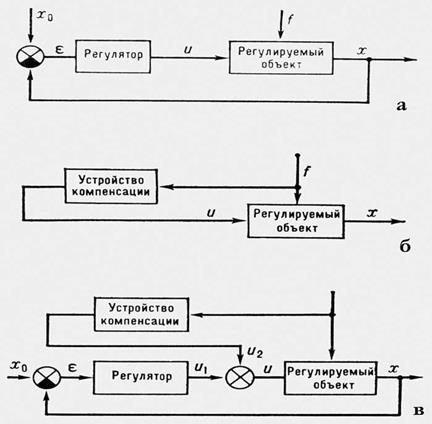
Регулирование автоматическое (от нем. regulieren - регулировать, от лат. regula - норма, правило), поддержание постоянства (стабилизация) некоторой регулируемой величины, характеризующей технический процесс, либо её изменение по заданному закону (программное регулирование) или в соответствии с некоторым измеряемым внешним процессом (следящее регулирование), осуществляемое приложением управляющего воздействия к регулирующему органу объекта регулирования; разновидность автоматического управления. При Р. а. управляющее воздействие u(t) обычно является функцией динамической ошибки - отклонения e(t) регулируемой величины х(t) от её заданного значения x0(t):e(t)= x0(t) - х(t) (принцип Ползунова - Уатта регулирования по отклонению, или принцип обратной связи) (рис., а). Иногда к Р. а. относят также управление, при котором u(t) вырабатывается (устройством компенсации) в функции возмущающего воздействия f (нагрузки) на объект (принцип Понселе регулирования по возмущению) (рис., б), и комбинированное регулирование по отклонению и возмущению (рис., б).