Реферат: Технологические средства автоматизации
![]() ПИ - пропорционально-интегральный (изодромный),
ПИ - пропорционально-интегральный (изодромный),  , ПИД - пропорционально-интегральный с производной,
, ПИД - пропорционально-интегральный с производной,
 ; здесь k - коэффициет усиления регулятора, Ти и Тд - постоянные времени интегрирования и дифференцирования. Фактическое воздействие u(t) отличается от u0(t)вследствие инерционности регулятора. CAP является динамической системой,процессы в которой описываются дифференциальными, дифференциально-разностными и т. п. уравнениями.
; здесь k - коэффициет усиления регулятора, Ти и Тд - постоянные времени интегрирования и дифференцирования. Фактическое воздействие u(t) отличается от u0(t)вследствие инерционности регулятора. CAP является динамической системой,процессы в которой описываются дифференциальными, дифференциально-разностными и т. п. уравнениями.
САР может находиться в состоянии равновесия, в ней могут протекать установившиеся и переходные процессы, количественные характеристики которых изучает теория автоматического регулирования (ТАР). В статических системах регулирования установившаяся погрешность (ошибка ) eст при постоянной нагрузке (на объект) зависит от величины последней. Для повышения статической точности увеличивают коэффициент усиления регулятора k,но при достижении им некоторого критического значения kkp система обычно теряет устойчивость. Введение в регулятор интегрирующих элементов позволяет получить астатическую систему регулирования, в которой при любой постоянной нагрузке статическая ошибка отсутствует. ТАР изучает условия устойчивости, показатели качества процесса регулирования (динамическую и статическую точность, время регулирования, колебательность системы, степень и запасы устойчивости и т. п.) и методы синтеза CAP, т. е. определения структуры и параметров корректирующих устройств, вводимых в регулятор для повышения устойчивости и обеспечения требуемых показателей качества Р. а.
Наиболее полно разработана ТАР линейных систем, в которой применяются аналитические и частотные методы исследования. Малые отклонения от равновесных состояний в непрерывных нелинейных системах Р. а. исследуются посредством линеаризации исходных уравнений. Процессы при больших отклонениях и специфических особенности; нелинейных CAP (предельные циклы, автоколебания, захватывание, скользящие режимы и т. п.) изучаются методами фазового пространства. Для изучения периодических режимов также применяют приближённые методы малого параметра, гармония, баланса и др. Устойчивость при больших отклонениях исследуется вторым (прямым) методом Ляпунова и методом абсолютной устойчивости, разработанным: В.М. Поповым (Румыния).
Особое место в ТАР занимают дискретные системы Р.а., в которых осуществляется квантование сигнала. Из них наиболее изучены импульсные системы (с квантованием по времени), релейные системы (с квантованием по уровню) и цифровые системы (с квантованием по времени и уровню). Частный вид релейных систем - двухпозиционные регуляторы, в которых регулирующий орган может занимать лишь одно из двух крайних положений.
Вопрос 94.
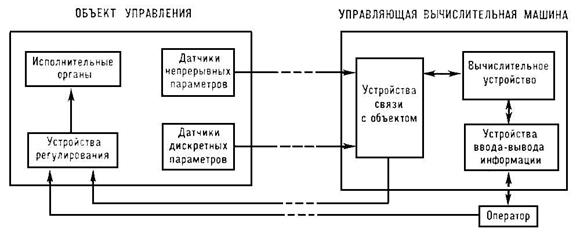
Управля ющая машина, управляющая вычислительная машина (УВМ), вычислительная машина, включенная в контур управления техническими объектами (процессами, машинами, системами). УВМ принимают и обрабатывают информацию, поступающую в процессе управления, и выдают управляющую информацию либо в виде текста, таблицы, графика, отпечатанных на бумаге или отображаемых на экране дисплея, либо в виде сигналов (воздействий), подаваемых на исполнительные органы объекта управления (см. рис.). Главная цель применения УВМ – обеспечение оптимальной работы объекта управления. Управление с помощью УВМ строится на основе математического описания поведения объектов. Отличительная особенность УВМ – наличие в них наряду с основными устройствами, входящими в состав всех ЭВМ (процессором, памятью и др.), комплекса устройств связи с объектом. К этому комплексу относятся устройства, осуществляющие ввод в процессор данных (получаемых от датчиков величин, характеризующих состояние управляемого объекта), устройства, обеспечивающие выдачу управляющих воздействий на исполнительные органы, а также различные преобразователи сигналов, устройства отображения информации.
Различают УВМ универсальные (общего назначения) и специализированные. К специализированным относятся УВМ, ориентированные на решение задач в системах, управляющих заранее определённым небольшим набором объектов (процессов). К универсальным относят УВМ, которые по своим техническим параметрам и возможностям могут быть использованы практически в любой системе управления. По способу представления информации УВМ делят на цифровые, аналоговые и гибридные – цифро-аналоговые. Цифровые УВМ превосходят аналоговые по точности управления, но уступают им в быстродействии. В гибридных УВМ цифровые и аналоговые вычислительные устройства работают совместно, что позволяет в максимально степени использовать их достоинства.
УВМ является центральным звеном в системах автоматического управления (САУ). Она осуществляет обработку информации о текущих значениях физических величин, характеризующих объект, и об их изменении, а также вырабатывает управляющие сигналы, обеспечивающие заданные режимы его работы. В автоматизированных системах управления (АСУ) технологическими процессами УВМ обычно работает в режиме советчика, выдавая оператору сведения о состоянии объекта управления и рекомендации по оптимизации процесса управления, или (реже) в режиме непосредственного управления. По назначению и области использования УВМ подразделяются на промышленные, аэрокосмические, транспортные и др.
Появление УВМ связано с разработкой бортовых вычислительный машин для военной авиации в начале 50-х гг. Так, например, одна из первых бортовых УВМ – «Диджитак» (США, 1952) предназначалась для автоматического управления полётом и посадкой самолёта, для решения задач навигации и бомбометания. В ней использо