Реферат: Теория автоматического управления судовой аппаратуры
Регуляторы прямого действия просты по устройству, обслуживанию в эксплуатации и дешевы в изготовлении, однако при больших усилиях, необходимых для воздействия на ИО, обеспечивают низкое качество процесса регулирования из-за малой работоспособности.
Работоспособность характеризует максимально возможную работу, которую способен совершить регулятор при движении его выходного звена из одного крайнего положения в другое, т. е. максимальное значение произведения силы на путь выходного звена регулятора, измеряемого в Н*м (кгс-см).
В регуляторах прямого действия работоспособность определяется значением движущей силы измерителя и зависит от конструктивных соотношений его подвижных звеньев. Повысить работоспособность можно, например, увеличением массы, активной площади либо объема чувствительного элемента с соответствующим увеличением жесткости пружин измерителя. Однако в этом случае возрастает инерционность регулятора и снижается качество работы АСР в динамике. Поэтому АСР прямого действия получили ограниченное распространение.
Электрические тахометры предназначены для измерения частоты вращения гребных валов, главных двигателей, турбонагнетателей, дизель-генераторов, вспомогательных механизмов и др.
В состав установки тахометров независимо от принципа работы входят датчик, с помощью которого непосредственно измеряется частота вращения (обычно генераторного типа), указатели частоты вращения и проводная линия связи.
Наибольшее применение находят вольтметровые тахометры, в основу работы которых положен принцип измерения напряжения генератора постоянного тока. В этих тахометрах используют практически прямую зависимость напряжения постоянного возбуждения (магнитоэлектрической системы) от частоты вращения его якоря.
Как известно из электротехники, напряжение на зажимах генератора определяется по формуле
U = E – I я R я = сФn – Ія Rя
где E – э.д.с. генератора;
I я – ток якоря;
R я – сопротивление якоря;
с – постоянная генератора;
Ф – магнитный поток;
n – частота вращения.
Значение I я R я характеризующее падение напряжения в обмотке якоря и в переходном сопротивлении между коллектором и щетками, мало по сравнению со значением Е = сФп. Поэтому можно считать, что U =сФп или при Ф = const U = c 1 n , где c 1 – коэффициент пропорциональности. Из этого следует, что напряжение на зажимах генератора, измеряемое вольтметром, прямо пропорционально частоте вращения якоря генератора, а следовательно, и частоте вращения контролируемого вала. Поэтому шкалу вольтметра можно отградуировать непосредственно в оборотах в минуту или в радианах в секунду.
Схема включения вольтметровых тахометров показана на рис. 4.
Гребной вал 1 через механическую передачу 2 (зубчатые колеса и цепную передачу) передает вращение якорю генератора 3. Последний в зависимости от передаваемой ему частоты вращения подводит электрическое напряжение по проводам 4 к указателям 5, представляющим собой магнитоэлектрические вольтметры. Каждому значению напряжения генератора, зависящему от частоты вращения контролируемых валов, соответствует определенное число оборотов в минуту гребных валов, отмечаемое на шкалах указателей-вольтметров.
Установка судовых тахогенераторов этого типа включает датчик или генератор постоянного тока, указатели или вольтметры, элементы механической передачи от вала к датчику и линию связи или кабели. Датчики представляют собой генераторы постоянного тока с постоянными магнитами. Исходя из принципа работы вольтметровых тахометров требуется, чтобы генератор имел линейную зависимость между значением э. д. с. и частотой вращения, т. е. чтобы Е = сФп = c 1 n г , для чего магнитный поток Ф генератора должен быть постоянным. Статором генератора служит кольцеобразный постоянный магнит с явновыраженными полюсами. В создаваемом этим магнитом поле вращается якорь с обмоткой. Для регулирования напряжения, развиваемого генератором, между его полюсами устанавливается магнитный шунт 3, принцип, работы которого поясняется на рис. 5.
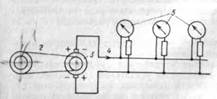
Рис. 4. Схема включения вольтметровых тахометров
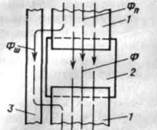
Рис. 5. Схема работы магнитного шунта:
/ – полюсы постоянных магнитов; 2 – якорь генератора; 3 – магнитный шунт
Отечественной промышленностью изготовляются датчики вольтметровых тахометров типа МЭТ 8/30 – это морские электрические тахометры, имеющие восемь указателей. Датчики типа МЭТ 8/30 развивают номинальное напряжение 30 В при 1500 об/мин. Указатели тахометров типов М‑150, М‑160, М‑170, М‑180, М‑185 и М‑186 являются магнитоэлектрическими приборами (вольтметрами) особой конструкции, имеющими поворот стрелки на 240°. Шкала вольтметра, отградуированная в оборотах в минуту с нулевой отметкой посередине, обеспечивает измерение скорости судна при ходе «Вперед» и «Назад». Стрелка указателя устанавливается на нулевую отметку шкалы корректором, винт которого расположен на цоколе прибора. Общее сопротивление каждого указателя должно иметь одинаковое значение. Для этого в каждом указателе имеется регулируемый резистор. Ось резистора выведена наружу позади цоколя и закрыта винтом, который препятствует проникновению воды в прибор. При помощи этого резистора производится точное согласование показаний всех указателей от одного датчика. Указатели некоторых типов имеют светящуюся стрелку и шкалу, указатели других типов имеют внутреннее электрическое освещение и светящуюся шкалу. Основная погрешность при измерении в пределах от 10 до 100% номинального значения частоты вращения вала не превышает ±1% от номинального значения шкалы.
Ввиду того что предельное число оборотов вала у всех датчиков одинаковое, для измерения различной частоты вращения валов применяются зубчатые передачи с разными передаточными отношениями. Ведущее зубчатое колесо делается разъемным и насаживается на ось датчика.
К положительным качествам вольтметровых тахометров относятся: быстрота измерения, равномерность градуировки шкалы указателя, простота и надежность действия, возможность подключения к датчику большого числа указателей (до восьми приборов) и небольшая погрешность измерений. Недостаток этой системы: изменение постоянства магнитного потока полюсов генераторов вследствие ударных сотрясений, вибрации и температурных колебаний, а также наличие коллектора, за которым требуется значительный уход.
Литература
1. В.С. Онасенко «Автоматизация судовых энергетических установок» Москва, «Транспорт», 1981