Реферат: Транспортное оборудование гибких производственных систем
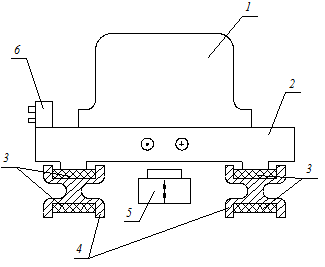
Рисунок 2. Схема устройства транспортирования палет на конвейере:
1- изделие; 2 - паллета; 3 - бесконечные ленты конвейера; 4 - несущие профили с полостью возврата ленты; 5 - выдвижной упор для остановки спутника; 6 - носитель кода.
Каждая паллета идентифицируется с помощью носителя кода кодов (бесконтактного датчика), что позволяет контролировать текущее местоположение каждого изделия в ГПС и осуществлять управление всей транспортной системой.
Гибкая конвейерная система представляет из себя систему конвейеров, расположенных между гибкими производственными модулями (ГПМ) ГПС так, что каждое изделие в ГПС может быть доставлено из любой ее точки к любому ГПМ. Такая система выполнена по модульному принципу и включает следующие основные модули:
- конвейерные ленты;
- модули подъема и поперечного сдвига.
В качестве примера на рисунке 3. приведена схема компоновки гибкой конвейерной системы фирмы BOSH.
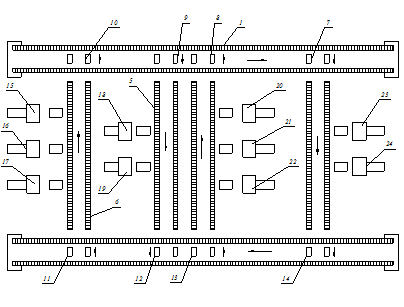
Рисунок 3. Схема компоновки гибкой конвейерной линии:
1-6 – конвейерные модули; 7-14 – модули подъема и поперечного сдвига; 15-24 – гибкие производственные модули
Конвейерные ленты оснащены приводами, перемещающими их с постоянной скоростью в одном направлении. Модули подъема и поперечного сдвига имеют трехпозиционный пневматический привод подъема и короткий участок ленточного транспортера. В нижнем положении этого модуля паллета свободно над ним проходит, а в верхнем положении паллета останавливается и переносится на участок соответствующего поперечного ленточного транспортера или на позицию загрузки соответствующего ГПМ.
В качестве средств транспортирования в ГПС наибольшее распространение получили самоходные транспортные тележки, которые часто называют транспортными роботами или роботрайлерами.
Транспортный робот - это программно-управляемая тележка со средствами загрузки и разгрузки транспортируемых изделий, автоматически перемещающаяся по программе управления в пределах участка, цеха, завода.
Простейшие транспортные роботы перемещаются по направляющим (рельсам), а подвод питания может осуществляться по гибким кабелям, от скользящих токопроводов, от автономных источников питания (аккумуляторов). Очевидно, что рельсовые тележки обладают недостаточной гибкостью перемещений по различным траекториям в пределах ГПС в связи со сложностью технических систем изменения направления перемещения.
Поэтому в настоящее время наибольшее распространение получили безрельсовые транспортные роботы (рис.4.), обеспечивающие наибольшую гибкость функционирования в ГПС.
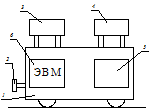
Рисунок 4. Схема транспортного робота:
1 - тележка (шасси); 2 - бампер системы торможения; 3-4 - грузовые платформы с приводом перегрузки изделий и направляющими; 5 – аккумулятор; 6-бортовая ЭВМ.
С помощью бортовой ЭВМ осуществляется управление транспортным роботом. Команды по маршруту следования вводятся в память бортовой ЭВМ по каналу связи с управляющим вычислительным комплексом ГПС. Аккумуляторы необходимы для питания используемых приводов и электрических устройств.
Автоматическое управление перемещением транспортным роботом требует наведения его на требуемую траекторию перемещения. Используются четыре основных способа наведения безрельсовых транспортных роботов на траекторию:
- оптический;
- индукционный;
- радионаведения.
При оптическом способе наведения управление осуществляется по белой линии (полосе), нанесенной на полу цеха. Для этого на тележке имеется устройство, освещающее белую линию, а приемное устройство (фотоэлемент), установленное на тележке, осуществляет прием отраженного сигнала, по характеру которого осуществляется автоматическое управление перемещением тележки.
При индукционном способе наведения на тележке устанавливают индукционные датчики, которые воспринимают низкочастотное магнитное поле, возбуждаемое током, проходящим по кабелю, уложенному в полу цеха. Сигналы этих датчиков используются для управления.
При использовании способа радионаведения вдоль траектории перемещения тележки располагают передающую антенну, а приемная антенна располагается на тележке.
Как показал опыт использования транспортных роботов, наиболее эффективным является оптический способ наведения.
Одной из важнейших задач управления тележкой является позиционирование тележки в позициях перегрузки изделий. Для этого используются следующие способы управления электроприводами тележки: