Реферат: Устойчивость линейной системы авторегулирования
Отличие коэффициента передачи К от оптимального приведет к увеличению ошибки. Ошибка складывается из динамической ошибки и ошибки по возмущению. Дисперсия динамической ошибки
 .
.
Спектральная плотность задающего воздействия
 .
.
Дисперсия задающего воздействия
 .
.
Выразим спектральную плотность Sn 0 процесса n (t ) через дисперсию задающего воздействия: Sn 0 = 2T ф s2 x з .
Частотная характеристика разомкнутой системы для схемы, изображенной на рис. 32, имеет вид:
![]()
 .
.
И соответственно,
![]() .
.![]()
Тогда
 . (15)
. (15)
|
    | ||||||||||||||||||||||||||
| Рис. 13 |
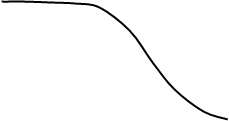
Для пояснения причины уменьшения динамической ошибки с ростом коэффициента передачи К обратимся к рис. 13, на котором представлены энергетический спектр процесса x з (t ) (пунктирная линия) и АЧХ замкнутой системы при различных значениях КТ ф (сплошные линии). Видим, что чем больше КТ ф , тем меньше отличие коэффициента передачи замкнутой системы от 1 в области частот, занятых спектром задающего воздействия.
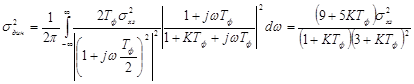
Дисперсия ошибки по возмущению вычисляется по формуле:
![]() .
.
Так как спектральная плотность возмущающего воздействия в r раз меньше спектральной плотности Sn 0 , то
![]()
и
 . (16)
. (16)
Дисперсия ошибки по возмущению увеличивается с ростом КТ ф , так как увеличивается площадь под АЧХ замкнутой системы. Зависимость дисперсии суммарной ошибки s2 = s2 дин + s2 воз от КТ ф показана на рис. 14 для различных значений r. Минимум достигается при оптимальном значении коэффициента передачи. Следует отметить, что оптимум не очень критичен и при двукратном отличии коэффициента передачи от оптимального дисперсия ошибки увеличивается на 15 – 20 %.
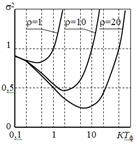
Рис.
Рассмотрим теперь, к какому увеличению дисперсии приведет отличие структуры системы от оптимальной. Допустим, что система первого порядка (рис. 32) осуществляет слежение за процессом x з (t ), образованным из белого шума формирующим фильтром второго порядка с пере-даточной функцией К ф (р ) = =1/(1 + рТ ф1 )2 . Подберем Т ф1 так, чтобы площади под |К ф (j w)½2 для однозвенного и двухзвенного фильтров были одинаковыми. Тогда будет соблюдаться равенство дисперсий выходных процессов обоих фильтров при одинаковой спектральной плотности входного белого шума. Это условие выполняется при Т ф1 = Т ф /2. На рис. 15 представлены АЧХ фильтров: однозвенного (сплошная линия) и двухзвенного (пунктирная линия). Из-за отличия спектров задающего воздействия изменится динамическая ошибка. Дисперсия динамической ошибки станет равной:
 .
.
Дисперсия ошибки по возмущению останется прежней, так как частотная характеристика замкнутой системы не изменилась. На рис. 36 показано, во сколько раз увеличивается минимальная дисперсия суммарной ошибки в системе с неоптимальной структурой по сравнению с дисперсией ошибки в оптимальной системе в зависимости от r.
|
| |||||||||||||||||||||||||||||||||
| Рис. 15 | Рис. 16 |
Дисперсия ошибки в оптимальной системе рассчитана по формуле: