Реферат: Выправочно-подбивочно-рихтовочные машины Duomatic, Unimat
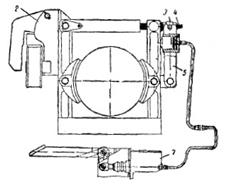
1 – тормозной рычаг; 2 – электромагнит тормоза; 3 – траверс; 4 – тормозной шток; 5 рабочий цилиндр; 6 – трубопровод; 7 – цилиндр управления; 8 – механический привод
Рисунок 3 - Колодочный управляемый тормоз с гидроэлектромагнитным приводом
Работа гидроцилиндра при включении тока создается давление в нижней полости цилиндра толкателя, под воздействием этого избыточного давления поршень толкателя передвигается в верх, воздействуя на рычажную систему тормоза. При выключении тока поршень под действием сжатой пружины тормоза и собственного веса опускается вниз.
В комбинированных гидроэлектромагнитных тормозах электромагниты рассчитываются на длительное включение и выключается только при выключении тока и действии конечных выключателей.
Гидравлический рабочий цилиндр, устанавливаемый на тормозе, позволяет по желанию крановщика осуществлять плановое притормаживание при включенном электромагните. Таким образом, гидроэлектромагнитный привод позволяет производить плавное торможение и в случае необходимости быстро останавливать кран.
Список использованной литературы
1. Александров М.П. Подъемно-транспортные машины: Учебник. М., 1985. 520с.
2. Парницкий А.Б., Шабашов А.П. Мостовые краны общего назначения. М., 1961. 316 .
3. Вайнсон А. А. Подъемно-транспортные машины: Учебник. Изд. 3-е, М., Машиностроение, 1974. 431 с.
4. СТО СГУПС 1.01 СДМ.01-2007 Система стандартизации университета. Стандарт организации. Требования к построению, изложению, оформлению и обозначению.